Illustration: Deborah Moldawski
Die Vorlesung Einführung in die Programmierung für Studierende der Physik stellt ein Pflichtmodul im Bachelor Studium Physik der Goethe-Universität Frankfurt dar. Bei regelmäßiger und erfolgreicher Teilnahme an den Übungen/Praktika erhalten Sie eine Zulassung zur Klausur. Den benoteten Schein und sechs Creditpoints erhält man schließlich bei bestandener Klausur. Falls Sie bereits in einem vergangenen Semester (nach der alten Studienordnung) die Zulassung zur Klausur erhalten haben, können Sie direkt an der abschließenden Klausur teilnehmen. Jedoch wird angeraten, die Vorlesung und die Übungen/Praktika trotzdem nochmals zu belegen, da sich die Inhalte und Schwerpunkte zu den vergangenen Vorlesungen unterscheiden könnten.
Einführung in die Programmierung für Studierende der Physik
(Introduction to Programming for Physicists)
Vorlesung SS 2026
Diese Internetseite fasst die Online-Angebote der Vorlesung Einführung in die Programmierung für Studierende der Physik zusammen. Die Vorlesungstermine finden jeweils dienstags von 15.00-16.00 Uhr und donnerstags von 14.00-16.00 Uhr im Raum Phys-0.111 statt. Die Termine der Übungen/Praktika finden Sie auf der Online-Lernplatform OLAT und die Übungsaufgaben werden im linken Panel am Ende der jeweiligen Vorlesungseinheit und zusätzlich auf OLAT bereitgestellt.
Die Vorlesung gibt einerseits eine Einführung in die objektorientierten Programmiersprachen C++ und Python und vermittelt andererseits einige wesentliche Grundlagen der numerischen Mathematik. Es werden die grundlegenden Elemente der beiden Programmiersprachen, das Programmierparadigma der Objektorientierung und Simulationen von komplexen physikalischen Problemen behandelt. Das Hauptanliegen der Vorlesung besteht darin, dass die Studierenden die numerische Lösung eines komplexen physikalischen Problems auf dem Computer erstellen können.
Literatur zu C++
- Prof. Dr. Marc Wagner, Vorlesung im SS 2024: Einführung in die Programmierung für Physiker
- B. W. Kernighan, D. M. Ritchie, Hanser: Programmieren in C
- Bjarne Stroustrup 2015: Die C++ Programmiersprache
- Bjarne Stroustrup 2009: Programming: Principles and Practice Using C++
- Prof. Dr. Claudius Gros, Vorlesung im WS 2021/22: Advanced Introduction to C++, Scientific Computing and Machine Learning
- WikiBooks: C++ Programmierung
- C++ reference
- cplusplus.com
- Learn C++
- C++ Questions and Answers
- C++ Core Guidelines by Bjarne Stroustrup and Herb Sutter
Literatur zu Python
- Python-Onlinekurs auf Deutsch
- Python 3 documentation
- Hans Petter Langtangen: A Primer on Scientific Programming with Python
- David M. Beazley: Python - Essential Reference
- B. Slatkin: Effective Python
Literatur zur Numerischen Mathematik
Literatur zu Nichtlinearer Dynamik und Chaostheorie
Vorlesung 1
Die objektorientierte Programmiersprache C++ wird im Fokus dieser Vorlesung stehen und nach einem kurzen Einblick in die grundlegenden Elemente der Programmiersprache C++ werden diverse Anwendungsbeispiele aus dem Bereich der Mathematik und Physik behandelt. C++ unterstützt eine Vielzahl von Programmier- und Programmentwurfstilen und wir werden uns im ersten Teil der Vorlesungsreihe zunächst mit der Prozeduralen Programmierung befassen und die wesentlichen in C++ integrierten Typen, Operatoren, Anweisungen und Funktionen anhand von Beispielen vorstellen. Danach werden wir den Programmierstil ändern und den Fokus auf die Strukturierung von Programmen legen (das Programmierparadigma der Objekt-orientierten Programmierung) und auf das in C++ integrierte Klassenkonzept, die Konstruktoren dieser Klassen und die öffentlich/private Zugriffssteuerung eingehen. Dann, im letzten Teil der Vorlesung, werden einige aufwendigere Programmierprojekte vorgestellt, auf weiterführende Themen eingegangen und aktuelle Forschungssimulationen von komplexen physikalischen Anwendungen vorgestellt.
Bevor Sie sich jedoch mit der Programmierung befassen können, müssen wir zunächst einige technische Dinge und nötige Voraussetzungen besprechen. Natürlich benötigt man einen Computer (PC oder Laptop) mit einem Betriebssystem (z.B. Windows, macOS, Linux). In der Fachgemeinde der numerischen Mathematik und theoretischen Physik ist das Betriebssystem Linux weit verbreitet und ich empfehle allen Studierenden, sich zumindest als Zweitsystem Linux zu installieren und die Programmierung auf einem Linux System auszuführen. Wir werden deshalb im Folgenden die wesentlichen, für uns relevanten Grundlagen des Betriebssystems Linux behandelt und danach einige der aktuellen Programmiersprachen kurz vorstellen und deren Installation kurz beschreiben. Zusätzlich erhalten die Studierenden in der ersten Vorlesung eigene Login-Accounts für die Rechner des Instituts für Theoretische Physik der Goethe-Universität und es wird beschrieben, wie man sich mittels des kryptografischen Netzwerkprotokolls SSH auf diese Rechner einloggt. In einem Anwendungsbeispiel wird dann beschrieben, wie man eine eigene Homepage erstellt.
Eine kleine Einführung in Linux
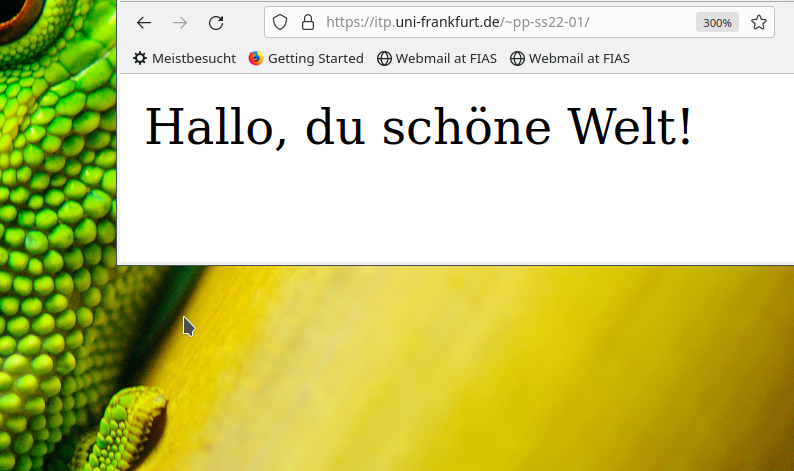
Anwendungsbeispiel: Erstellen einer eigenen Internet-Homepage
In diesem Unterpunkt werden einige der besprochenen Linux Shell-Befehle angewendet, um die Erstellung einer eigenen Internet-Homepage zu realisieren. Zusätzlich wird das Secure File Transfer Protocol (SFTP) vorgestellt, mit dem man in verschlüsselter Form von einem Rechner auf einen anderen Rechner Daten übertragen kann (näheres siehe Anwendungsbeispiel: Erstellen einer eigenen Internet-Homepage).
Programmiersprachen
Höhere Programmiersprachen gibt es schon seit den 1950er Jahren und die älteste noch in weitem Gebrauch befindliche Programmiersprache ist Fortran (FORmula TRANslator). Die Programmiersprache BASIC (Beginner's All-purpose Symbolic Instruction Code) wurde Ende der 1970er Jahre, aufgrund der für Jedermann erschwinglichen Heimcomputern (z.B. der Commodore C-64) populär. Die Programmiersprache C entstand 1972 und die Objekt-orientierte Variante von C (C++) wurde im Jahre 1983 von Bjarne Stroustrup vorgestellt. In der Vorlesung wird der Schwerpunkt auf der Programmiersprache C++ liegen und für die Visualisierung der berechneten Daten wird die Skriptsprache Python benutzt, die Anfang der 1990er Jahre entwickelt wurde (siehe Zeittafel der Programmiersprachen). Die Installation von C++ und Python ist auf allen gängigen Betriebssystemen möglich und wird am Beispiel des Betriebssystems Linux unter dem folgenden Link kurz beschrieben: Programmiersprachen.Vorlesungsaufzeichnung (14.04.2026) Teil 1 , Teil 2
Vorlesungsaufzeichnung (21.04.2025)
Vorlesung 1
Die Physik verfolgt das Ziel, grundlegende Gesetzmäßigkeiten der Natur zu erkennen und zu erklären. Jede quantitative Beschreibung von Vorgängen, nicht nur im Bereich der Physik, benutzt mathematische Zusammenhänge, um das zu beschreibende System zu verstehen. Oft sind diese mathematischen Gleichungen in Form von Bewegungsgleichungen formuliert, deren Lösungen man dann zu bestimmen und analysieren hat. Für einfache physikalische Probleme ist eine solche Lösung auf analytisch mathematischem Weg möglich, jedoch je komplexer, bzw. je realitätsnaher, das zu untersuchende Problem wird, desto komplizierter wird auch dessen Lösung und oft ist es dann auf analytischem Weg nicht mehr möglich eine zusammenhängende mathematische Lösungsgleichung zu finden. Der Computer kann einem bei solchen Problemen in vielschichtiger Weise helfen und in dieser Vorlesung sollen die Studierenden lernen, wie man dem Computer das Problem erklärt, sodass er die numerische Lösung bestimmen kann. Für die Programmierung benötigt man einerseits das Vokabular einer gängigen objektorientierten Programmiersprache (z.B. C++, Java, Python) und andererseits eine auf Algorithmen basierende Vorgehensweise, die die zugrundeliegenden physikalischen Gleichungen numerisch, in einem iterativen Prozess löst, um diese dann grafisch darstellen und analysieren zu können.
Ein bekanntes Beispiel eines physikalischen Problems, welches man auf analytischem, mathematischem Weg nicht lösen kann ist das physikalische Pendel aus dem Themenbereich der Mechanik (siehe z.B. W.Greiner, Klassische Mechanik I). Die zugrundeliegende Bewegungsgleichung des Problems lautet \[ \begin{equation} \frac{d^2 \phi(t)}{dt^2} = -\frac{g}{l} \cdot \hbox{sin}\left( \phi(t) \right) \quad , \end{equation} \] wobei $g$ die Erdbeschleunigung, $l$ die Länge des Pendels und $\phi(t)$ die zeitliche Entwicklung des Pendelwinkels beschreibt. Ungünstigerweise besitzt diese DGL keine analytisch darstellbare Lösung und gewöhnlich vereinfacht man dann das zu beschreibende System (z.B. durch Approximation zum mathematischen Pendel) und gelangt auf diesem Wege doch zu analytischen Lösungen, deren Verhalten man studieren kann. Vergleicht man die Lösung dann mit der Realität, stimmt diese oft nur unter gewissen Randbedingungen. Nimmt man jedoch Anfangswerte des Pendels, die außerhalb des Gültigkeitsbereiches der approximierten Lösung liegen, weichen die Vorhersagen der Pendelbewegung deutlich von der wirklichen Lösung ab. Stoßen wir z.B. das Pendel mit einem sehr starken "Schubs" aus seiner Ruhelage, so stimmt die analytische Lösung des mathematischen Pendels nicht und das wirkliche Pendel verhält sich vollkommen anders. Die folgenden Animationen entstammen einem Python Jupyter Notebook und sie vergleichen die numerische Lösung des physikalischen Pendels mit der analytischen Lösung des mathematischen Pendels, bei der ein Pendelüberschlag nicht möglich ist.
In diesem Vorlesungsteil werden, nach einem kurzen Überblick in die Inhalte der gesamten Vorlesung, die Grundlagen des Betriebssystems Linux behandelt und einige der aktuellen Programmiersprachen kurz vorgestellt.
Vorlesung 2
Das erste C++ Programm (Hello World)
In diesem Unterpunkt wird die Programmiersprache C++ am Beispiel des klassischen Hello World Programms vorgestellt. C++ ist eine kompilierte Programmiersprache, d.h. der vom Programmierer geschriebene Quelltext des Computerprogramms muss zunächst mittels eines Compilers in ein ausführbares Programm umgewandelt werden, damit es genutzt werden kann. Dieser Kompilierungsprozess und die Textausgabe des ausführbaren Hello World Programms im Linuxterminal (mittels cout bzw. printf) wird unter folgendem Link vorgestellt: Das erste C++ Programm (Hello World).
Datentypen und Variablen
In gleicher Weise, wie es in der Mathematik die unterschiedlichen Zahlenmengen (z.B. ℤ, ℕ, ℝ, ℂ ) gibt und man bei mathematischen Berechnungen den Wertebereich einer Variable oder Funktion vorher definieren muss, ist dies auch beim Programmieren in C++ nötig. In diesem Unterpunkt werden die Begriffe Deklaration einer Variable, Datentyp, Wert einer Variable und die Initialisierung einer Variable diskutiert. Die wichtigsten integrierten Datentypen von C++ sind bool, char, int, float und double. Näheres siehe unter folgendem Link: Datentypen und Variablen
Arithmetik und Operatoren
Möchte man mit Datentypen und Variablen mathematische Berechnungen durchführen oder die Datenwerte miteinander vergleichen, ist es zunächst nötig eine Arithmetik (die zum Zählen oder Rechnen gehörige Kunst) zu definieren. Hierzu wurden in C++ geeignete Operatoren definiert, die dem Programmierer neben den arithmetischen Grundrechenarten (Multiplikation, Addition, ...) noch diverse weitere integrierte Operatoren zur Verfügung stellen. Man unterscheidet hierbei die arithmetischen Operatoren, die logischen Vergleichsoperatoren und weitere spezifische Operatoren. Zusätzlich sind einige wichtige mathematische Funktionen (Sinus, Cosinus, ..) in der Standardbibliothek <cmath> vordefiniert (näheres siehe Arithmetik und Operatoren).
Die Ein- und Ausgabe
In diesem Unterpunkt werden wir die Eingabe von Zahlenwerten durch den Benutzer vorstellen und die formatierte Ausgabe von Datenwerten im Terminalfenster näher betrachten. Die Programmiersprache C++ stellt mehrere integrierte Möglichkeiten der Benutzereingabe und Ausgabe bereit und es werden im Speziellen die Eingabe mittels "cin" und "scanf(...)" und die Ausgabe mittels "cout" und "printf(...)" betrachtet. Am Ende wird noch die hilfreiche Standardbibliothek <limits> vorgestellt, die viele Werte zu Limitierungen bei numerischen Berechnungen enthält (näheres siehe Ein- und Ausgabe).
Vorlesungsaufzeichnung (16.04.2026)
Vorlesungsaufzeichnung (24.04.2025)
Übungsblatt Nr. 2
Vorlesung 2
Im Folgenden wird vorausgesetzt, dass Sie auf Ihrem eigenen Computer einen lauffähigen C++ Compiler und Python 3 installiert haben. Im Gegensatz zur Programmiersprache Python, die den Quelltext eines Programms selbst in einen plattformunabhängigen Bytecode übersetzt, der dann direkt von einem Interpreter ausgeführt wird, ist die Programmiersprache C++ eine kompilierte Programmiersprache. Der erste Unterpunkt dieser Vorlesung zeigt, wie man von dem Quelltext eines C++ Programms mittels eines Compilers zu einem ausführbaren Programm gelangt. Wir beginnen hier, wie viele andere Einführungen in die Programmierung, mit der C++ Version des klassischen Hello World Programms. Es wird die Textausgabe im Linuxterminal und Eingabe von Zahlenwerten über die Tastatur vorgestellt.
Unser Hauptanliegen in dieser Vorlesungsreihe besteht darin, die Eigenschaften von physikalischen Systemen und die Lösung von mathematischen Problemstellungen mittels des Computers zu simulieren. Hat man ein physikalisches Problem in einer oder mehreren mathematischen Gleichungen formuliert und quantifiziert, muss man diese Ausdrücke in eine dem Computer verständlichen Form bringen, z.B. die Gleichungen in einem C++ oder Python Programm implementieren. In der Programmiersprache Python kann man die Gleichungen und die in diesen enthaltenen auftretenden Variablen direkt in den Quelltext schreiben, ohne vorher zu benennen, zu welcher Zahlenmenge diese Variable zugehörig ist. Dagegen ist die Programmiersprache C++ hier ein wenig präziser und jede Variable muss mit einem Typbezeichner versehen werden, der die Zahlenmengen-Zugehörigkeit und den im Hauptspeicher reservierten Speicherbedarf der Variable festlegt (siehe Datentypen und Variablen). Legt man jedoch gleich bei der Deklaration der Variable einen speziellen Zahlenwert fest (Initialisierungsprozess), ist es auch in C++ nicht mehr nötig den Typ der Variable explizit anzugeben und man kann dafür den Bezeichner ''auto'' benutzen. Ähnlich wie in Python wird dann beim Initialisierungsprozess der Typ automatisch festlegt.
Neben den grundlegenden, integrierten Datentypen von C++ werden die mittels Operatoren integrierte Arithmetik ebenfalls in dieser Vorlesung behandelt (siehe Arithmetik und Operatoren). Am Ende der Vorlesung werden die Benutzereingabe und die formatierte Ausgabe von Zahlenwerten thematisiert, der Zahlenraum ℝ$_C$ in dem der Computer rechnet definiert und die damit verbundene Rechenungenauigkeit verdeutlicht (siehe Ein- und Ausgabe).
Vorlesung 3
C++ Anweisungen: Die for-, while- und do-Schleifen
Möchte man als Programmierer ein Problem mittels eines C++ Programms lösen, so muss man dem Computer in Form von Anweisungen sagen, was er zu erledigen hat. In diesem Unterpunkt behandeln wir eine der wichtigsten Anweisungsarten, die sogenannten Schleifenanweisungen. Im Prinzip ist jede Programmzeile, die mit einem Semikolon endet, eine Anweisung an den Computer, jedoch stellen die Schleifenanweisungen eine besondere Art von iterativen Anweisungsprozessen dar, und sind ein oft verwendetes Hilfsmittel der prozeduralen Programmierung. Eine Schleifenanweisung kann als eine for-, while- oder do-Anweisung ausgedrückt werden (näheres siehe C++ Anweisungen: Die for-, while- und do-Schleifen).
Anwendungsbeispiel: Folgen und Reihen
Die im vorigen Unterpunkt besprochenen Schleifenanweisungen finden in vielen C++ Programmen ihre Anwendung. In diesem Unterpunkt wird ihre Anwendung im Bereich der mathematischen Folgen und Reihen diskutiert. Am Beispiel der konvergenten Folge der Eulersche Zahl $e$ und der Leibniz-Reihe zur Berechnung der Kreiszahl $\pi$ wird die Verwendung der while-Schleife vorgestellt. Das Umschreiben der Programme unter Verwendung einer for-Schleife ist Teil der Aufgabe 2 des (siehe Übungsblattes Nr. 3. Es wird unter anderem das Konvergenzverhalten der Folge für die ersten Folgenglieder untersucht und die von vom Programm ausgegebenen Werte visualisiert. Hierzu werden die ausgegebenen Daten in eine separate Datei umgeleitet und dann mittels Gnuplot bzw. Python-Matplotlib dargestellt. Am Ende wird dieses Unterpunktes wird ein weiteres Anwendungsbeispiel einer diskreten Folge, die sogenannte logistische Abbildung, besprochen (näheres siehe Anwendungsbeispiel: Folgen und Reihen).
Eine kleine Einführung in die Programmiersprache Python
Die Programmiersprache Python ist auch eine sehr gute objektorientierte Programmiersprache und im Prinzip hätten wir die gesamte Vorlesung nur mittels Python gestalten können. Die in dieser Vorlesung behandelten Python-Skripte und Python Jupyter Notebooks werden jedoch lediglich zur Visualisierung von Daten und im Bereich der Illustration von mathematisch/physikalischen Gleichungen benutzt. Mittels des Python-Moduls "matplotlib" (siehe Matplotlib: Visualization with Python) können auf einem einfachen Weg Bilder and Animationen des zuvor mit C++ simulierten Systems erzeugt werden. Zusätzlich werden wir, die im nächsten Unterpunkt besprochene C++ Computerarithmetik mittels eines Python Jupyter Notebooks verdeutlichen und dabei die Verwendung von Listen, Arrays und for- und while-Schleifen in der Programmiersprache Python kennenlernen (näheres siehe Eine kleine Einführung in die Programmiersprache Python).
Die Computerarithmetik und der Fehler in numerischen Berechnungen
In diesem Unterpunkt werden wir zwei Klassen von Fehlerquellen in numerischen Berechnungen besprechen, den sogenannten Rundungsfehler, der aufgrund der Computerarithmetik entsteht und der sogenannte Approximierungsfehler (Abschneidefehler bzw.'Truncation error'), der immer dann auftritt, wenn der Programmierer eine exakte mathematische Gleichung mittels approximativer Ausdrücke annähert (näheres siehe Die Computerarithmetik und der Fehler in numerischen Berechnungen).
Vorlesungsaufzeichnung (21.04.2026)
Vorlesungsaufzeichnung (23.04.2026)
Vorlesungsaufzeichnung (29.04.2025)
Vorlesungsaufzeichnung (06.05.2025)
Übungsblatt Nr. 3
Vorlesung 3
In dieser Vorlesung werden wir die wohl wichtigste Form von C++ Anweisungen, die sogenannten Schleifenanweisungen, kennenlernen. Die Schleifenanweisungen stellen einen iterativen Anweisungsprozess dar und können in Form von for-, while- oder do-Anweisung ausgedrückt werden. Möchte man z.B. die natürlichen Zahlen von Null bis 100 im Terminal ausgeben lassen, so kann man dies in einer einfachen Weise mittels einer Schleifenanweisung dem Computer sagen. Die Anwendung von Schleifenanweisung wird danach an mehreren Beispielen mathematischer Folgen und Reihen diskutiert.
Die Visualisierung von Daten, die mittels C++ Programmen erstellt wurden, ist ein wichtiges Teilgebiet eines Programmierers im Bereich der Physik. In dieser Vorlesung werden diverse Python-Skripte und Python Jupyter Notebooks vorgestellt, die zur Visualisierung von Daten und im Bereich der Illustration von mathematisch/physikalischen Gleichungen benutzt werden. Mittels des Python-Moduls "matplotlib" (siehe Matplotlib: Visualization with Python) können auf einem einfachen Weg Bilder and Animationen des zuvor mit C++ simulierten Systems erzeugt werden.
Am Ende der Vorlesung kommen wir nochmals auf den, bereits im Unterkapitel Datentypen und Variablen angesprochenen Zahlenraum des Computers (ℝ$_C$) zurück und diskutieren die zwei wichtigsten Fehlerquellen bei numerischen Berechnungen (Rundungsfehler und Approximierungsfehler). Der Rundungsfehler ist darin begründet, dass der Zahlenraum des Computers (ℝ$_C$), nur eine relativ kleine Teilmenge der reellen Zahlen benutzt und somit reellwertige Zahlen mit einer unendlichen Anzahl von Nachkommastellen nicht speichern kann. Diese Teilmenge ℝ$_C$ umfasst nur rationale Zahlen und speichert den gebrochenen Teil, der mit Mantisse bezeichnet wird, zusammen mit dem exponentiellen Teil, welchen man Charakteristik nennt als eine binäre Liste von Nullen und Einsen. Die zweite Klasse von numerischen Fehlern, die Approximierungsfehler, werden am Beispiel der approximativen Annäherung an die Kreiszahl $\pi$ mittels der alternierenden Leibniz-Reihe besprochen. Bei dieser Art von Fehlern hat es der Programmierer selbst in der Hand, wie genau er in seinem Programm die Berechnung durchführen möchte (näheres siehe Die Computerarithmetik und der Fehler in numerischen Berechnungen).
Vorlesung 4
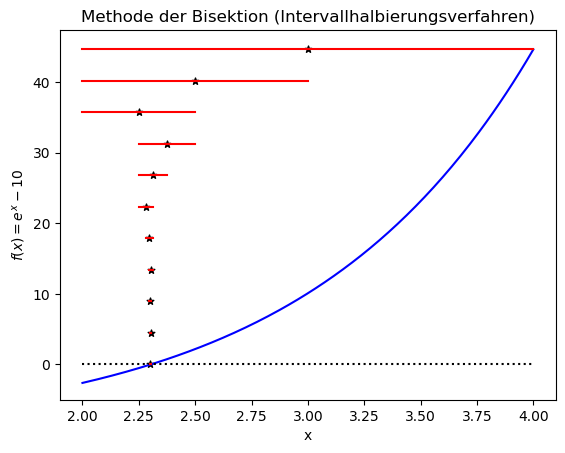
In dieser Vorlesung werden wir zunächst die Auswahlanweisungen der Sprache C++ vorstellen und danach auf die Definition von C++ Funktionen eingehen. In dem Anwendungsbeispiel Nullstellensuche einer Funktion werden dann die erlernten Konzepte am Beispiel der Methode der Bisektion, dem sogenannten Intervallhalbierungsverfahren verdeutlicht. Zusätzlich wird am Ende die Newton-Raphson Methode der Nullstellenermittlung vorgestellt.
C++ Anweisungen: Auswahlanweisungen mit if und switch
Die Programmiersprache C++ bietet einen konventionellen und flexiblen Satz von Anweisungen. Im Prinzip ist jede Programmzeile, die mit einem Semikolon endet, eine Anweisung. In diesem Unterpunkt werden wir die sogenannten Auswahlanweisungen behandeln, wobei wir in der vorigen Vorlesung die Schleifenanweisungen vorstellt hatten (siehe C++ Anweisungen: Die for-, while- und do-Schleifen). Auswahlanweisungen werden auch als Verzweigung , Tests oder bedingte Anweisungen bezeichnet und sind immer dann anzuwenden, wenn das Programm bei einem gewissen Ereignis bzw. unter einer gewissen Bedingung etwas Bestimmtes tun soll. Es teilt somit das Programm in unterschiedliche Anweisungspfade auf. Auswahlanweisungen können in Form einer if-, (if-else)- oder switch-Anweisung ausgedrückt werden. C++ Anweisungen: Auswahlanweisungen mit if und switch
Funktionen in C++
Die Definition einer C++ Funktion ist im Grunde nichts Anderes, als eine Code-Block (Anweisungsblock) mit einem Funktionsnamen zu verbinden. C++ Funktionen werden außerhalb der main()-Hauptfunktion definiert und vereinfachen somit das Verständnis und die Lesbarkeit des Quelltextes. C++ Funktionen sind ein wichtiges Werkzeug, um den Quelltext eines Programms zu ordnen und wesentliche Algorithmen und zusammenhängende Anweisungsblöcke der main()-Hauptfunktion in einer zusammenhängenden Form auszulagern. Die Definition einer C++ Funktion besteht aus einer Deklaration und einem Anweisungsblock und sie ist der formalen Definition einer mathematischen Funktion nicht unähnlich: "Eine C++ Funktion ist eine Abbildung von dem Datenraum der Argumentenliste in den Datenraum des Rückgabetyps. Die dabei benutzte Abbildungsvorschrift findet sich in dem Anweisungsblock der Funktion. Der 'Rückgabe Typ' kann hierbei eine der schon besprochenen Datentypen (z.B. int oder double) oder ein Daten-Array (siehe nächste Vorlesung) sein. Die Argumentenliste setzt sich aus einer Liste von Datentypen der formalen Argumente (Parameter) der Funktion zusammen, die jeweils mit einem Komma voneinander getrennt sind. In C++ hat das Wort Funktion eine allgemeinere Bedeutung als im Bereich der Mathematik und die in der Mathematik und Physik definierten Funktionen stellen eine echte Teilmenge der C++ Funktionen dar (näheres siehe Funktionen in C++).
Anwendungsbeispiel: Nullstellensuche einer Funktion
Vorlesungsaufzeichnung (28.04.2026)
Vorlesungsaufzeichnung (30.04.2026)
Vorlesungsaufzeichnung (08.05.2025)
Übungsblatt Nr. 4
Vorlesung 4
Die möglichen integrierten Anweisungsbefehle innerhalb einer Programmiersprache sind die wohl wichtigsten Grundvokabeln, die man als Programmierer kennen muss. In der vorigen Vorlesung hatten wir uns bereits mit den Schleifenanweisungen befasst und in dieser Vorlesung werden wir uns mit den Auswahlanweisungen beschäftigen. Im Speziellen werden die if-Anweisung, die (if-else)-Anweisung und die switch-Anweisung besprochen. Auswahlanweisungen stellen eine Art von Programmverzweigungen dar und sind immer dann anzuwenden, wenn das Programm bei einem gewissen Ereignis etwas Bestimmtes tun soll.
Ein weiteres wichtiges Konzept bei der Erstellung eines C++ Quelltextes ist der Begriff der "Funktion". C++ Funktionen sind ein wichtiges Werkzeug, um den Quelltext eines Programms zu ordnen und wesentliche Algorithmen und zusammenhängende Anweisungsblöcke der main()-Hauptfunktion in einer zusammenhängenden Form auszulagern. Man könnte salopp sagen, dass Funktionen kleine Unterprogramme sind, die definierte Teilprobleme lösen. Im Grunde bedeutet die Definition einer Funktion im Programm nichts Anderes, als eine Code-Block (Anweisungsblock) mit einem Funktionsnamen zu verbinden. In C++ hat das Wort Funktion eine allgemeinere Bedeutung als im Bereich der Mathematik und die in der Mathematik und Physik definierten Funktionen stellen eine echte Teilmenge der C++ Funktionen dar. Wir werden in dieser Vorlesung lediglich eine erste grundsätzliche Einführung in den Themenbereich der C++ Funktionen geben und auf die allgemeinere Verwendung von Funktionen im Laufe der Vorlesung noch genauer eingehen. Gerade in den Unterpunkten, die sich mit der objektorientierten Programmierung befassen, sind Klassen-Funktionen, Konstruktoren und das Überladen von Funktionen ein wichtiges Thema.
Am Ende dieser Vorlesung wenden wir das Erlernte an und besprechen eines der grundlegenden Probleme der numerischen Mathematik: Die Nullstellensuche einer Funktion. Wir nehmen dabei an, dass eine Funktion $f(x)$ im Intervall $[a,b] \in ℝ$ eine Nullstelle hat und berechnen dann diese Nullstelle numerisch, approximativ mittels der Methode der Bisektion und dem Newton-Raphson Algorithmus. Beide Methoden werden in dem Anwendungsbeispiel: Nullstellensuche einer Funktion im Detail besprochen und der zugrundeliegende Algorithmus der Nullstellensuche wird mittels einer Python-Skript Visualisierung verdeutlicht.
Vorlesung 5
In dieser Vorlesung werden wir zunächst auf das C++ Array- und Zeiger Konzept eingehen und sowohl die eindimensionalen Zahlenarrays, als auch die eindimensionalen Zeichenarrays an Beispielen verdeutlichen. Am Ende des ersten Teils gehen wir auf die Problematik der Übergabe eines Arrays an eine C++ Funktion ein. Als ein Anwendungsbeispiel der eindimensionalen Arrays betrachten wir dann die Lagrange Polynome Methode, bei der ein Polynom mittels einer gegebenen Anzahl an Stützstellen berechnet wird. Es wird ein C++ Programm vorgestellt, welches mittels des Lagrange Polynom Algorithmus die xy-Wertetabelle des Polynoms erzeugt und diese Daten werden dann mittels eines Python Jupyter Notebooks visualisiert. Zusätzlich wird in dem Notebook auch die analytische Form der Polynome unter Verwendung der Computer-Algebra-Bibliothek "sympy" berechnet und dieses Notebook zeigt somit ein weiteres wichtiges Anwendungsfeld von Python Jupyter Notebooks auf, das dem Verständnis und der Herleitung der zu berechnenden Gleichungen dient.
C++ Arrays, Zeiger und Referenzen
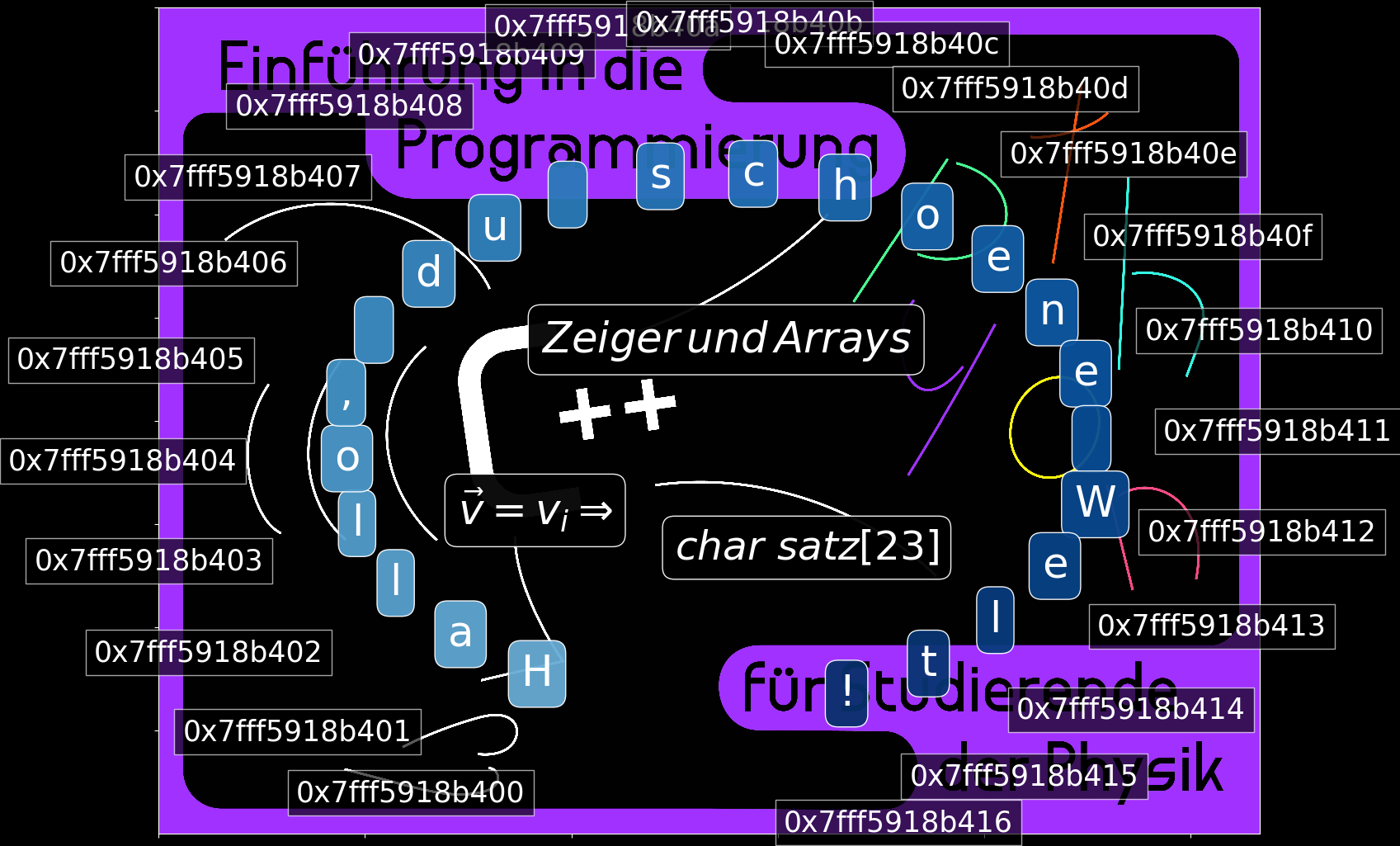
Alle die bis zu diesem Abschnitt besprochenen Datentypen, verbinden den Namen des deklarierten Typs mit einem einzelnen Wert, d.h. mit einer skalarwertigen Größe. Um die in der Physik und Mathematik gebräuchlichen Größen wie Vektoren und Matrizen in einem Computerprogramm adäquat abbilden zu können, gibt es die sogenannten Datenarrays. Ein C++ Array ist eine geordnete Menge von Elementen des gleichen Typs T. In diesem Unterpunkt werden die wesentlichen Grundlagen zu eindimensionalen C++ Arrays vorgestellt. Da die interne Array-Implementierung der Programmiersprache C++ eng mit dem C++ Zeiger Konzept verknüpft ist, werden wir zunächst die Begriffe Zeiger, Adresse und Referenz an mehreren Beispielen vorstellen, um danach die eindimensionalen Arrays am Beispiel des Zeichen-Arrays des "HelloWorld" - Programmes zu verdeutlichen (siehe nebenstehende Abbildung). Das C++-Zeigerkonzept ist der grundlegende integrierte Sprachmechanismus, um den Zugriff auf den Hauptspeicher des Computers direkt zu ermöglichen. Am Ende dieses Unterpunktes zeigen wir, wie man Arrays an Funktionen übergeben kann (näheres siehe C++ Arrays, Zeiger und Referenzen).
Anwendungsbeispiel: Interpolation und Polynomapproximation
Vorlesungsaufzeichnung (05.05.2026)
Vorlesungsaufzeichnung (07.05.2026)
Vorlesungsaufzeichnung (13.05.2025)
Vorlesungsaufzeichnung (15.05.2025)
Übungsblatt Nr. 5
Vorlesung 5
Die zugrundeliegenden Gleichungen der Physik sind oft in Form von vektoriellen und matrixwertigen Gleichungen formuliert. Vektoren und Matrizen sind mathematische Konstrukte, die eine Vielzahl von Elementen (Zahlen) in einer gebundenen Form zusammenfassen. Wie deklariert man ein solches zusammengesetztes Konstrukt in einem C++ Programm? An diesem Punkt der Vorlesung wollen wir noch nicht auf das C++ Container Konzept eingehen, welches unter anderem den wichtigen Container vector der Standardbibliothek bereitstellt, sondern wir betrachten uns das schon in alten C-Programmen oft verwendete, integrierte C++ Array Konzept. Ein C++ Array (nicht zu verwechseln mit dem Container array der Standardbibliothek) stellt ein zusammengesetztes Konstrukt von Elementen eines Datentyps dar. Ein Vektor $\vec{v}=\left( 1, 3, 7 \right)$ bestehend aus drei ganzzahligen Elementen kann z.B. mittels des int-Arrays "int v[3] = {1,3,4};" definiert werden. Der Zugriff auf die einzelnen Werte des Arrays erfolgt hierbei durch Angabe seines Indexes, wobei die Elemente von 0 bis 2 indiziert werden (z.B. $v_1=3 \, \rightarrow$ v[1]). Wie wird nun ein solches zusammenhängendes Konstrukt von Zahlen im Hauptspeicher geordnet gespeichert? Da die interne Array-Implementierung der Programmiersprache C++ eng mit dem C++ Zeiger Konzept verknüpft ist, werden wir in dieser Vorlesung zunächst die Begriffe Zeiger, Adresse und Referenz an mehreren Beispielen vorstellen und die eindimensionalen Arrays am Beispiel des Zeichen-Arrays des "HelloWorld" - Programmes verdeutlichen (siehe obere Abbildung im linken Frame). Das C++-Zeigerkonzept ist der grundlegende integrierte Sprachmechanismus, um den Zugriff auf den Hauptspeicher des Computers direkt zu ermöglichen. Zusätzlich wird darauf eingegangen, wie man Arrays an C++ Funktionen übergibt.
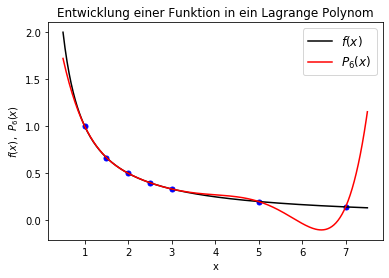
Das erlernte C++ Array Konzept wird dann an dem Beispiel der Methode der Lagrange Polynome verdeutlicht. Die Lagrange Polynome Methode ist ein wichtiges Teilgebiet der numerischen Mathematik und es befasst sich mit der Problematik ein Polynom vom Grade $n$ ($P_n(x)$) mittels einer gegebenen Anzahl von ($n+1$) Stützstellenpunkten zu bestimmen. Das Verfahren wird bei einer Vielzahl von numerischen Algorithmen verwendet, bei denen eine vorgegebene Funktion $f(x)$ durch ein Polynom $P_n(x)$, mittels der Angabe der ($n+1$) x-Werte der Stützstellenpunkte ($\vec{x}=\left( x_0, x_1, \, ... \,, x_n \right)$), approximiert wird. Die untere Abbildung im linken Frame veranschaulicht z.B. das Lagrange Polynom $P_6(x)$, welches die Funktion $f(x)=1/x$ mittels der sieben Stützstellen $\vec{x}=\left( 1, 1.5, 2, 2.5, 3, 5, 7 \right)$ approximiert. Die Methode der Lagrange Polynome ist ein wichtiges Hilfsmittel der numerischen Mathematik, jedoch wird sie selten in Programmen verwendet, da es numerisch geeignetere Methoden der Interpolation gibt. Wie wir im nebenstehenden Anwendungsbeispiel sehen werden, unterscheidet sich das approximierte Lagrange Polynom oft erheblich von der wirklichen Funktion und bei einer Verwendung einer großen Anzahl von Stützstellen oszilliert das approximierte Polynom von hohem Grade oft in großem Maße um $f(x)$. Mittels einer stückweisen Polynomapproximation (z.B. die kubische Spline-Interpolation) kann oft eine bessere numerische Approximation erzielt werden.
Vorlesung 6
Mehrdimensionale C++ Arrays
In diesem Unterpunkt werden wir uns mit der Deklaration von integrierten mehrdimensionale C++ Arrays befassen. C++ Zahlen-Arrays haben bei der Programmierung von physikalischen Problemen eine bedeutende Rolle, da sie der numerischen Implementierung von Matrizen entsprechen. Obwohl die eigentliche Definition dieser zusammenhängenden Objekte einfachen Darstellungen folgt und z.B. der Zugriff auf die Elemente eines C++ Arrays mittels einer in der Physik gebräuchlichen Index-Schreibweise erfolgt, ist die genaue interne Speicherung solcher Matrix-ähnlicher Strukturen nicht so einfach zu verstehen und bedarf eines Zeigerkonzeptes (siehe C++ Arrays, Zeiger und Referenzen). In gleicher Weise wie auch bei eindimensionalen Arrays sind mehrdimensionale C++ Arrays mittels des Konstruktes des Zeigers implementiert. Eine $(m \times n)$-Matrix ${\bf \cal A}$, bestehend aus Gleitkommazahlen vom Typ double kann auf tiefster Ebene als ein integriertes Array deklariert werden: double A[m][n]; Der Zugriff auf den Wert eines Array-Elementes kann nun entweder durch die Angabe des entsprechenden Matrix-Indexes (A[i][j]), oder durch den dereferenzierten Wert seiner Zeigerposition im Array erfolgen ( *(A[i] + j) bzw. *(zeiger_A + i*n + j) ). Danach wird am Beispiel der Multiplikation zweier Matrizen der Zugriff auf die einzelnen Elemente des Arrays verdeutlicht. Zuletzt wird das Thema Mehrdimensionale C++ Arrays und Funktionen behandelt (näheres siehe Mehrdimensionale C++ Arrays).
Jupyter Notebooks und das Rechnen mit symbolischen Ausdrücken
Numerische Differentiation
Die im vorigen Unterpunkt hergeleiteten Differentiationsregeln der numerischen Mathematik sind im Folgenden nochmals zusammenfassend dargestellt:
In diesem Unterpunkt werden die Ableitungsregeln in einem C++ Programm verwendet, um die numerische Ableitung der Funktion $f(x)= 10 \, e^{-x/10} \cdot \hbox{sin}(x)$ zu approximieren und die Ergebnisse dann mit der wirklichen, analytisch bestimmbaren Ableitung $f^\prime(x)$ zu vergleichen (näheres siehe Numerische Differentiation).
Vorlesungsaufzeichnung (12.05.2026)
Vorlesungsaufzeichnung (19.05.2026)
Vorlesungsaufzeichnung (21.05.2026)
Vorlesungsaufzeichnung (20.05.2025)
Vorlesungsaufzeichnung (22.05.2025)
Übungsblatt Nr. 6
Übungsblatt Nr. 7
Vorlesung 6
Im ersten Teil dieser Vorlesung werden wir uns zunächst mit der Deklaration von mehrdimensionale C++ Arrays befassen. Zweidimensionale C++ Zahlen-Arrays entsprechen der numerischen Implementierung von zweidimensionale Matrizen, welche in der Physik eine bedeutende Rolle spielen. Möchten wir z.B. eine $(m \times n)$-Matrix ${\bf \cal A} = (a_{ij})_{i=1,2,...,m \, ; \, j=1,2,...,n}$), bestehend aus Gleitkommazahlen vom Typ double in einem C++ Programm als ein integriertes Array deklarieren, so würden wir die folgende Anweisung in den Quelltext schreiben: \[ \begin{equation} {\bf \cal A} =\left( \begin{array}{cccc} a_{11} & a_{12} & ... & a_{1n}\\ a_{21}& a_{22}& ...&a_{2n} \\ ...& ...& ...& ...\\ a_{m1}& a_{m2}& ...& a_{mn}\\ \end{array} \right) \, \Longrightarrow \, \hbox{Deklaration: double A[m][n];} \end{equation} \] In gleicher Weise wie auch bei eindimensionalen Arrays sind mehrdimensionale C++ Arrays mittels des Konstruktes des Zeigers implementiert und die einzelnen Elemente eines Arrays (z.B. "double A[m][n]") sind im Hauptspeicher in Form von Zeigern geordnet. In modernen C++-Programme werden Matrizen hingegen meist in Form von geschachtelten Container der Standardbibliothek konstruiert - dies ist Teil der Vorlesung 8.
Der zweite Teil der Vorlesung befasst sich mit dem Thema der numerischen Differentiation. Die Ableitung (Differentiation) einer Funktion stellt ein fundamentales Konzept der Mathematik dar, welches bei der Formulierung von physikalischen Bewegungsgleichungen essenziell ist. Die mathematische Definition der Ableitung einer Funktion, der sogenannte Differentialquotient, benutzt dabei eine Grenzwert-Formulierung ($h \to 0$), wobei in der numerischen Mathematik hingegen mehrere Differentiationsregeln formuliert werden, die den wirklichen Wert der Ableitung approximieren. Die analytische Herleitung dieser Regeln benutzt die Methode der Lagrange Polynome (siehe Anwendungsbeispiel: Interpolation und Polynomapproximation). Im zweiten Unterpunkt des linken Frames dieser Vorlesung wird die Herleitung der Differentiationsregeln mittels eines Python Jupyter Notebooks behandelt und im dritten Unterpunkt werden die Differentiationsregeln in einem C++ Programm verwendet, um die Ableitung einer Funktion $f(x)$ approximativ zu bestimmen.
Vorlesung 7
In dieser Vorlesung werden wir den Programmier- und Programmentwurfstil der objektorientierten Programmierung kennenlernen. Die gesamte Idee der objektorientierten Programmierung beruht gänzlich auf dem Konzept der Klasse. Eine C++ Klasse ist ein benutzerdefinierter neuer Datentyp, der durch das Schlüsselwort 'class' gekennzeichnet wird. Außerdem werden wir, nachdem wir in einem Jupyter Notebook die Integrationsregeln hergeleitet haben, den Anwendungsfall der numerischen Integration betrachten.
Objekt-orientierte Programmierung und C++ Klassen
Die meisten Programmiertechniken, die wir bis jetzt kennengelernt haben, verwendeten den Programmentwurfstil der prozeduralen Programmierung. Wir werden nun den Fokus auf die Strukturierung von Programmen legen (das Programmierparadigma der objektorientierten Programmierung) und auf das in C++ integrierte Klassenkonzept eingehen. Das Konzept der objektorientierten Programmierung beruht auf der alltäglichen Erfahrung, dass man Objekte nach zwei Maßstäben beurteilt: Ein Objekt besitzt einerseits messbare Eigenschaften und ist aber auch andererseits über seine Verhaltensweisen definiert. Eine C++ Klasse ist ein benutzerdefinierter neuer Datentyp, der durch das Schlüsselwort 'class' gekennzeichnet wird und die gesamte Idee der objektorientierten Programmierung beruht gänzlich auf diesem Konzept der Klasse. In einer C++ Klasse werden die messbaren Eigenschaften des Objektes in Instanzvariablen (Daten-Member) gespeichert und durch Konstruktoren werden diese Daten-Member dann initialisiert. Die Verhaltensweisen des Objektes werden durch klasseninterne Funktionen, die sogenannten Member-Funktionen beschrieben (näheres siehe Objekt-orientierte Programmierung und C++ Klassen).
Theorie: Numerische Integration
Anwendungsbeispiel: Numerische Integration
Die im vorigen Unterpunkt hergeleiteten Integrationsregeln der numerischen Mathematik sind im Folgenden nochmals zusammenfassend dargestellt:
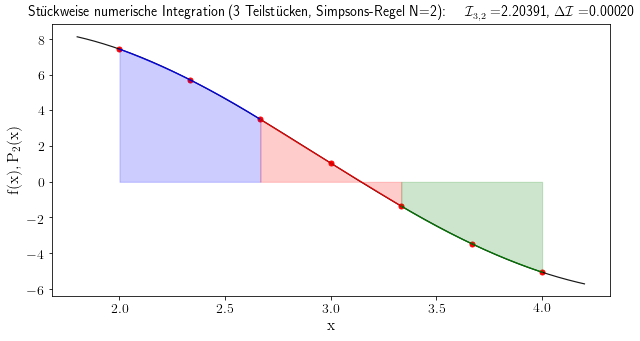
, wobei die jeweiligen Stützstellen $x_i$ in gleichförmiger Weise zwischen den Integrationsgrenzen aufgeteilt werden (z.B. für die N=4 Regel: $(x_0=a, x_1=x_0 + h, x_2=x_0 + 2h, x_3=x_0 + 3h, x_4=x_0 + 4h=b)$. In diesem Unterpunkt werden die Integrationsregeln in einem C++ Programm verwendet, um das bestimmte Integral der Funktion $f(x)= 10 \, e^{-x/10} \cdot \hbox{sin}(x)$ in den Grenzen [2,4] mittels der numerischen Integrationsregeln approximativ zu berechnen: $\int_2^4 10 \, e^{-x/10} \cdot \hbox{sin}(x) \, dx$ (näheres siehe Anwendungsbeispiel: Numerische Integration).
Vorlesungsaufzeichnung (26.05.2026)
Vorlesungsaufzeichnung (28.05.2026)
Vorlesungsaufzeichnung (27.05.2025)
Vorlesungsaufzeichnung (03.06.2025)
Übungsblatt Nr. 8
Vorlesung 7
Mittels der bisher erlernten Programmierkonzepte und dem verwendeten Programmentwurfstil der prozeduralen Programmierung, können wir bereits viele umfangreiche numerische Berechnungen durchführen. In dieser Vorlesung werden wir eine ganz neue Art von Herangehensweise bei der Konzeption eines Programmes erlernen - die objektorientierte Programmierung. Mittels eigener, dem Problem angepasster Programmobjekte ist es durch einen Abstraktionsmechanismus möglich, eine geordnete Struktur in einen C++ Quelltext zu bringen. Eine Klasse stellt dabei den Bauplan für das zu konstruierende Objekt bereit und die wirkliche Realisierung des Objektes (die Instanzbildung) findet dann im Hauptprogramm zur Laufzeit statt. Eine Klasse stellt somit eine formale Beschreibung dar, wie das Objekt beschaffen ist, d.h. welche Merkmale (Instanzvariablen bzw. Daten-Member der Klasse) und Verhaltensweisen (Methoden der Klasse bzw. Member-Funktionen) das zu beschreibende Objekt hat. Eine Klasse ist also eine Vorlage, eine abstrakte Idee, die ein Grundgerüst von Eigenschaften und Methoden vorgibt. Die Erzeugung eines Objektes dieser Klasse entspricht der Materialisierung dieser Idee im Programm. Bei der Erzeugung des Objektes wird der sogenannte Konstruktor der Klasse aufgerufen, und verlässt das Objekt den Gültigkeitsbereich seines Teilbereiches des Programms, wird es durch den sogenannten Destruktor wieder zerstört. Das Grundgerüst einer Klasse besitzt die folgende Form (siehe untere Box), wobei im Anweisungsblock der Klasse nicht alle der aufgezählten Größen deklariert bzw. definiert werden müssen.
class Klassenname {
Private Instanzvariablen (Daten-Member)
public:
Konstruktoren
Member-Funktionen
(Destruktor)
};
Eine Klasse ist somit ein benutzerdefinierter Typ, der die Aufgabe hat, ein Konzept im Code eines Programms zusammenhängend und strukturiert darzustellen. Ein auf objektorientierten Prinzipien aufgebauter Quelltext, in welchem die wesentlichen Kernkonzepte und Ideen eines Programms durch einen gut ausgewählten Satz von Klassen formuliert sind, ist wesentlich einfacher zu verstehen. Die Frage, ob es sinnvoll ist ein Programm in eine Klassenstruktur zu bringen ist nicht leicht zu beantworten. Es ist hierbei wichtig, das gesamte Programm auf wiederverwertbare Algorithmen und kapselbare Konzepte zu untersuchen und diese zusammenhängenden Code-Fragmente in einer Klasse sinnvoll und möglichst benutzerfreundlich zu implementieren. Als Beispiel werden wir in diesem Vorlesungsteil das Konzept der Lagrange Polynome mittels einer Klasse konstruieren.
Vorlesung 8
Die Container der Standardbibliothek, insbesondere der sequentielle Container <vector>, sind ein wichtiges Abstraktionskonstrukt, das man einfach in seinen eigenen Programmen verwenden kann. In dieser Vorlesung werden wir im ersten Unterpunkt die Klasse <vector> kennenlernen und auf unterschiedliche Beispiele anwenden. Der zweite Unterpunkt befasst sich dann mit dem numerischen Lösen von Differentialgleichungen erster Ordnung.
C++ Container und die vector Klasse der Standardbibliothek
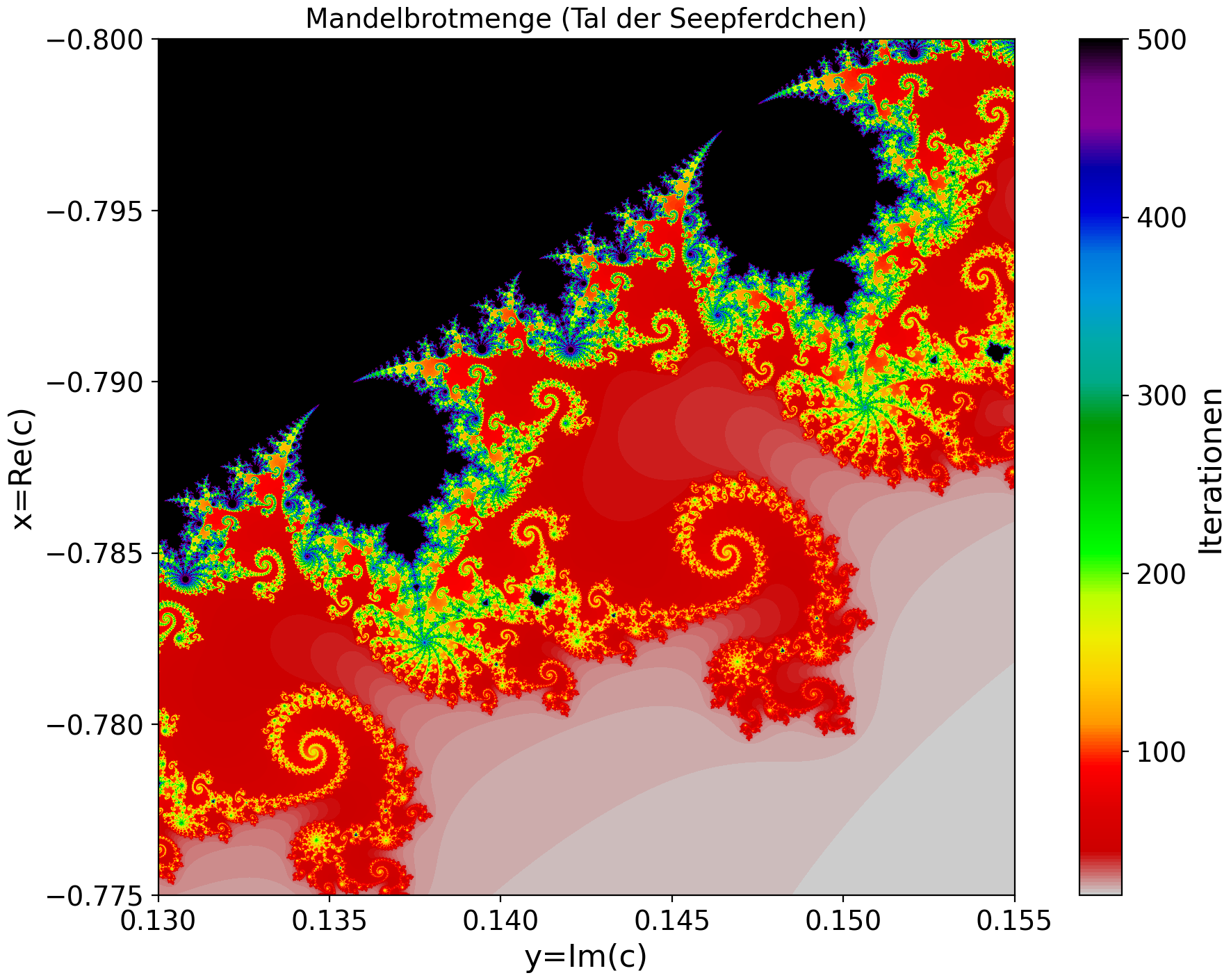
Die C++ Standardbibliothek verfügt über eine Vielzahl nützlicher Programmierkonstrukte und ein oft verwendetes Klassenkonzept sind die sogenannten C++ Container. Ein Container ist ein Objekt, das eine Sammlung von Elementen aufnimmt. Die verfügbaren STL-Container gliedern sich in sequentielle Container (wie z.B. '<vector>' und '<list>') und ungeordnete/geordnete assoziative Container (wie z.B. '<map>' und '<unordered_map>'). In diesem Unterpunkt werden wir uns mit dem Container <vector> näher befassen. Der STL-Container <vector> stellt einen sequenziellen Typ von Objekten dar und ist somit eine Sequenz von Elementen eines bestimmten Typs. Man kann sich die Struktur eines vector-Objektes als ein eindimensionales Array vorstellen, bei welchem man zusätzlich noch die Anzahl der Elemente im Programmverlauf verändern kann. Außerdem stellt die vector-Klasse mehrere Memberfunktionen bereit, die einem bei der Konstruktion des Vektors helfen. Wir gehen zunächst auf die Klassenstruktur des standard Containers <vector> ein und verdeutlichen das Konzept des Vektors anhand von Integer Vektoren. Am Beispiel der Mandelbrot-Menge (siehe Grafik im rechten Panel dieser Vorlesung) werden wir in diesem Unterpunkt auch die Klasse der komplexen Zahlen der C++ Standardbibliothek kennenlernen und sehen, wie man einen vector-Container bestehend aus komplexwertigen Zahlen erstellt. Man kann die Klasse <vector> jedoch auch als ein Container von Objekten verwenden. Dies verdeutlichen wir anhand einer Simulation von nicht-wechselwirkenden Ding-Objekten (siehe Abbildung oben links; näheres siehe C++ Container und die vector Klasse der Standardbibliothek).
Differentialgleichungen: Numerische Lösung von Anfangswertproblemen
In diesem Unterpunkt werden wir unterschiedliche Verfahren zum Lösen von Differentialgleichungen (DGL) erster Ordnung kennenlernen. Zunächst wird der iterative Algorithmus zum numerischen Lösen einer DGL am Beispiel des einfachen Euler Verfahrens beschrieben und auf die DGL $\dot{y}(t) = - y(t)$ angewandt. Danach werden einige weitere Verfahren zum Lösen einer DGL erster Ordnung vorgestellt (Mittelpunktmethode, modifizierte Euler Methode und Runge-Kutta Ordnung vier Methode) und in einem C++ Programm auf die DGL $\dot{y}(t) = y(t) - t^2 + 1$ angewandt. Am Ende werden die simulierten Zeitentwicklungen der unterschiedlichen Verfahren in einem Jupyter Notebook visualisiert und miteinander verglichen. Zusätzlich wird in diesem Notebook auch die numerische Lösung direkt in Python generiert (Funktion "solve_ivp(...)" im Python-Modul "scipy.integrate"). Näheres siehe Differentialgleichungen: Numerische Lösung von Anfangswertproblemen.
Vorlesungsaufzeichnung (02.06.2026)
Vorlesungsaufzeichnung (09.06.2026)
Vorlesungsaufzeichnung (05.06.2025)
Vorlesungsaufzeichnung (10.06.2025)
Übungsblatt Nr. 9
Vorlesung 8
In der vorigen Vorlesung hatten wir das Klassenkonzept kennengelernt und eine Beispielklasse 'Ding' erstellt. Hierbei wurden die messbaren Eigenschaften des Dings (Daten-Member der Klasse) von den Verhaltensweisen des Dings (Member-Funktionen der Klasse) getrennt in der Klasse implementiert. Wie programmiert man die Verhaltensweisen eines Objektes? Das Verhalten eines Objektes unter einem einwirkenden Einfluss ist mit einer Art von zeitlichem Verlauf verbunden. In Abhängigkeit von der jeweiligen Fragestellung und Natur des physikalischen Problems sind generell zwei unterschiedliche Programmarten von zeitlich veränderlichen Systemen zu identifizieren: Die direkt auf den Eigenschaften des Objektes angreifenden Agenten-basierte Simulation und andererseits die auf deterministischen Differentialgleichungen gründenden Simulationen von physikalischen Bewegungsgleichungen. Im ersten Teil dieser Vorlesung (siehe C++ Container und die vector Klasse der Standardbibliothek) werden wir eine Art von Agenten-basierter Simulation kennenlernen. Die 'Agenten' stellen in diesem Fall die Teilchen in einer Kiste dar, die als Objekte der Klasse 'Ding' erzeugt wurden. Die zeitliche Entwicklung wird hierbei über eine Member-Funktion realisiert. Die Klasse <vector> der C++ Standardbibliothek (STL: Standard Template Library) wird dann als ein Container verwendet, bei dem die Elemente des Containers selbst Objekte von Klassen sind.
Zusätzlich werden wir auch komplexwertige Folgen mittels der Klasse der komplexen Zahlen der C++ Standardbibliothek behandeln und fraktale Strukturen am Beispiel der Mandelbrot-Menge (siehe untere Abbildung) diskutieren.
Im zweiten Teil werden wir dann sehen, wie man eine zeitliche Entwicklung eines Systems unter Verwendung seiner Bewegungsgleichungen simuliert, falls diese keine analytische Lösung besitzt (näheres siehe Differentialgleichungen: Numerische Lösung von Anfangswertproblemen). In dieser und der folgenden Vorlesung werden wir uns dem Themenbereich des numerischen Lösens von Differentialgleichungen widmen und mehrere Verfahren zum Lösen von Differentialgleichungen erster Ordnung kennenlernen. Die einzelnen Verfahren werden dann in einem C++ Programm implementiert und miteinander verglichen. Zusätzlich wird in einem Jupyter Notebook gezeigt, wie man mittels Python auch numerisch eine Differentialgleichung lösen kann.
Vorlesung 9
In dieser Vorlesung befassen wir uns zunächst mit dem numerischen Lösen von Systemen gekoppelter Differentialgleichungen und Differentialgleichungen zweiter Ordnung und stellen im darauf folgenden Teil mögliche Programmierprojekte vor, von denen wir einige im Laufe der Vorlesung noch bearbeitet werden. Beim Klicken auf die Überschriften der Projekte gelangen Sie zu einer detaillierteren Beschreibung der einzelnen Projektthemen.
Systeme von gekoppelten Differentialgleichungen und Differentialgleichungen zweiter Ordnung
In der vorigen Vorlesung hatten wir die unterschiedlichen Verfahren zum Lösen von Differentialgleichungen erster Ordnung kennengelernt. Die Bewegungsgleichungen vieler physikalischer Systeme sind jedoch von zweiter Ordnung in der Zeit und in diesem Teilkapitel beschreiben wir die Vorgehensweise wie man solche Differentialgleichungen höherer Ordnung numerisch mittels eines C++ Programmes löst. Um eine Differentialgleichung zweiter Ordnung mittels des Computers lösen zu können, schreibt man die DGL zunächst in ein System von zwei gekoppelten Differentialgleichungen ersten Ordnung um und diese löst man dann mit den Verfahren, die in der vorigen Vorlesung behandelt wurden. In diesem Unterpunkt werden wir uns zunächst mit Systemen von gekoppelten Differentialgleichungen erster Ordnung befassen und dann das numerische Lösen von Differentialgleichungen zweiter Ordnung vorstellen (näheres siehe Systeme von gekoppelten Differentialgleichungen und Differentialgleichungen zweiter Ordnung).
Mögliche Programmier-Projekte
Das Foucaultsche Pendel
Im Jahre 1851 gelang Jean Bernard Léon Foucault ein anschaulicher Beweis der Erdrotation. Aufgrund der, in rotierenden Bezugssystemen auftretenden Coriolisbeschleunigung, dreht sich die Schwingungsebene des Pendels langsam. Dieses Projekt ist ein Anwendungsfall der Newtonschen Mechanik in bewegten Bezugssystemen (siehe z.B. Walter Greiner, 'Klassische Mechanik II' [8. Auflage, 2008, Kapitel I3. Seite 18]) und das zugrundeliegende System von drei gekoppelten Differentialgleichungen zweiter Ordnung gilt es numerisch mittels eines C++ Programmes zu lösen und die berechneten Daten mittels Python zu visualisieren.
Das periodisch angetriebene Pendel
Das Projekt periodisch angetriebenes Pendel ist ein Anwendungsfall aus der klassischen Mechanik (siehe z.B. Walter Greiner, 'Klassische Mechanik II' [8. Auflage, 2008, Kapitel VII27. Seite 496]). Das System besteht aus einem Pendel, auf welches zusätzlich eine äußere Kraft mit periodischer Zeitabhängigkeit wirkt. Außerdem soll das Pendel durch eine geschwindigkeitsabhängige Luftreibung gedämpft sein. Die zugrundeliegende Bewegungsgleichung des periodisch angetriebenen Pendels ist stark nichtlinear und die, nur auf numerischem Weg zu berechnenden Lösungen, zeigen deterministisch chaotische Bewegungen.
Das Doppelpendel
Das Projekt Doppelpendel ist ein Anwendungsfall aus der klassischen Mechanik. Das System besteht aus zwei miteinander verbundenen Pendeln, wobei wir die Luftreibung zunächst vernachlässigen. Die Herleitung der Bewegungsgleichungen des Doppelpendels erfolgt am elegantesten mittels der Euler-Lagrange Gleichungen, bzw. mittels der Hamilton Theorie. Mittels der Lagrange-Gleichungen gelangt man zu zwei gekoppelten Differentialgleichungen zweiter Ordnung, die man dann in ein System von vier gekoppelten DGLs erster Ordnung umschreiben muss um es numerisch lösen zu können. Die zugrundeliegende Bewegungsgleichung des Doppelpendels ist stark nichtlinear, sodass kleine Abänderungen in den Anfangswerten, nach einiger Zeit qualitativ unterschiedliche Bewegungen zur Folge haben (deterministisches Chaos).
Die schwingende Kette
Das Projekt Die schwingende Kette ist ein zentrales Beispiel eines schwingenden Massensystems, ein Problem aus der klassischen Mechanik (siehe Walter Greiner, 'Klassische Mechanik II' [8. Auflage, 2008, Kapitel I7. Seite 76]). Das System besteht aus einem masselosen Faden, der mit $N+1$ Massenpunkten (Dingen, Teilchen, Perlen) besetzt ist. Jede Perle besitzt einen ganzzahligen Bezeichner $n$ (die Nummer der Perle) und die erste ($n=0$) und letzte Perle ($n=N$) wird so befestigt, dass sie sich nicht im Raum bewegen können. Die Bewegungsgleichung der schwingenden Kette stellen ein System von $N$ Differentialgleichungen zweiter Ordnung dar. Es sollen die Spezialfälle $N=3$ und $N=5$ mittels eines Python Jupyter Notebooks analytisch und numerisch gelöst werden. Zusätzlich soll die numerische Lösung auch mit einem C++ Programm simuliert und dann durch Erhöhung der Teilchenzahl der Kontinuums-Grenzwert der schwingenden Saite approximativ abgebildet werden (siehe Walter Greiner, 'Klassische Mechanik II' [8. Auflage, 2008, Kapitel I8. Seite 88]).
Planetenbewegungen
In diesem Projekt wird die Bewegung eines Körpers in einem gravitativem Zentralkraftfeld untersucht. Die Bewegungsgleichung eines Massenpunktes (Venus, Erde) im Gravitationsfeld der Sonne ist ein oft behandeltes System in der klassischen Mechanik (siehe z.B. Walter Greiner, 'Mechanik Teil 1' [5. Auflage, 1989, Kapitel 26. Seite 266])). Die Bewegungsgleichungen des betrachteten Systems in drei Dimensionen, formuliert mittels der Newtonschen Gravitationstheorie, stellen ein System von drei gekoppelten Differentialgleichungen 2. Ordnung dar, die man dann in ein System von sechs gekoppelten DGLs erster Ordnung umschreiben muss um es numerisch lösen zu können.
Räuber-Beute Simulationen
Das Projekt Räuber Beute Simulation hat Ihren Ursprung im Fachgebiet der Populationsökologie (bzw. Populations-/Evolutionsbiologie). Die Räuber-Beute Gleichung beschreibt den natürlichen Überlebenskampf mehrerer Spezies, die einander auffressen. Die Population der Räuberwesen ernährt sich von der Population der Beutewesen und sinkt die Anzahl der Beutewesen, so erniedrigt sich die Reproduktionsrate der Räuberwesen, da diese Hunger erleiden müssen. Das Projekt besteht aus zwei formell getrennten Simulationen: Eine Agenten-ähnliche Simulation auf individueller Lebewesen Formulierung und eine Simulation, die auf Basis einer analytischen Räuber-Beute Gleichung.
Die Achterbahn
Das Projekt Achterbahn ist ein Anwendungsfall aus der klassischen Mechanik. Das Problem ist eine Verallgemeinerung des Problems "Bewegung eines Massenpunktes auf einer Zykloidenbahn" (siehe Aufgabe 15.7: Walter Greiner, 'Klassische Mechanik II' [8. Auflage, 2008, Kapitel V15. Seite 271]). Das System besteht aus zwei Achterbahn-Wagen unterschiedlicher Massen $m_i \, , \,\, i \in [0,1]$, die reibungsfrei auf einer Metallschiene gleiten können. Die Achterbahn hat eine Länge von $l \, [m]$ und besitzt keine Kurven, sodass man den Verlauf der Metallschiene der Achterbahn als eine eindimensionale Funktion $h(x) \, , \,\, x \in [-l/2, l/2]$ beschreiben kann, wobei $h(x)$ die Höhe der Metallschiene der Achterbahn an der Position $x$ in der Einheit Metern beschreibt. Die Herleitung der Bewegungsgleichungen erfolgt am elegantesten mittels der Euler-Lagrange Gleichungen, bzw. mittels der Hamilton Theorie. Die Bewegung eines Wagens wird durch eine Differentialgleichung zweiter Ordnung bestimmt und diese hängt nicht von dem Wert der Masse des Wagens ab. Um diese DGL zweiter Ordnung numerisch lösen zu können, schreibt man sie in ein System von zwei DGLs erster Ordnung um.
Vorlesungsaufzeichnung (11.06.2026)
Vorlesungsaufzeichnung (12.06.2025)
Vorlesungsaufzeichnung (17.06.2025)
Übungsblatt Nr. 10
Vorlesung 9
Das numerische Lösen von Differentialgleichungen ist ein mathematisch anspruchsvolles Thema und kann in dieser Vorlesung nicht im Detail erläutert werden. Im ersten Teil dieser Vorlesung sollen die im vorigen Unterpunkt (Differentialgleichungen: Numerische Lösung von Anfangswertproblemen) besprochenen Verfahren auf Systeme von gekoppelten Differentialgleichungen und Differentialgleichungen zweiter Ordnung angewendet werden. Die Bewegungsgleichungen vieler physikalischer Systeme sind von zweiter Ordnung in der Zeit und es soll die Vorgehensweise besprochen werden, wie man solche Differentialgleichungen höherer Ordnung numerisch mittels eines C++ Programmes löst.
Ab der nächsten Vorlesung (Vorlesung 10) werden wir einige größere Programmier-Projekte bearbeiten, wobei viele dieser Projekte Probleme behandeln, die man nur mittels einer numerischen Lösung adäquat beschreiben kann (siehe linkes Panel dieser Vorlesung). Beim Klicken auf die Überschriften der Projekte gelangen Sie zu einer detaillierteren Beschreibung der einzelnen Projektthemen.
Vorlesung 10
In dieser Vorlesung werden wir zunächst das Programmierprojekt Die schwingende Kette besprechen. Die Bewegungsgleichung der schwingenden Kette für $N$-Perlen stellen ein System von $N$ Differentialgleichungen zweiter Ordnung dar. Das Umschreiben dieses DGL-Systems in ein System von $2N$ DGLs erster Ordnung und die Implementierung und Lösung der Gleichungen mittels eines C++ Programmes wird ebenfalls beispielhaft vorgeführt. Zusätzlich werden die Spezialfälle für $N=3$ und $N=5$ mittels eines Python Jupyter Notebooks analytisch behandelt. Im zweiten Unterpunkt der Vorlesung werden wir auf die Vererbung von Klassenmerkmalen bei abgeleiteten Klassen und auf Klassenhierarchien eingehen. Im letzten Unterpunkt behandeln wir dann das Projekt Planetenbewegungen und das n-Körper-Problem.
Die schwingende Kette
Das Projekt Die schwingende Kette ist ein zentrales Beispiel eines schwingenden Massensystems aus dem Bereich der klassischen Mechanik (siehe Walter Greiner, 'Klassische Mechanik II' [8. Auflage, 2008, Kapitel I7. Seite 76]). Das System besteht aus einem masselosen Faden, der mit $N+1$ Massenpunkten (Dingen, Teilchen, Perlen) besetzt ist. Jede Perle besitzt einen ganzzahligen Bezeichner $n$ (die Nummer der Perle). Die erste ($n=0$) und die letzte Perle ($n=N$) werden so befestigt, dass sie sich nicht im Raum bewegen können. Die Bewegungsgleichungen der schwingenden Kette stellen ein System von $N$ Differentialgleichungen zweiter Ordnung dar. Es werden die Spezialfälle $N=3$ und $N=5$ mittels eines Python Jupyter Notebooks (siehe Notebook: Die schwingende Kette) analytisch gelöst und die Eigenfrequenzen und Eigenschwingungen der schwingenden Kette werden analysiert. Zusätzlich wird die numerische Lösung mit einem C++ Programm simuliert (siehe SchwingendeKette.cpp) und dann durch Erhöhung der Teilchenzahl der Kontinuums-Grenzwert der schwingenden Saite approximativ abgebildet (siehe Walter Greiner, 'Klassische Mechanik II' [8. Auflage, 2008, Kapitel I8. Seite 88]). Die neben stehende Animation zeigt z.B. eine Simulation mit $N=200$ Perlen (näheres siehe Projekt: Die schwingende Kette).
Abgeleitete Klassen, Vererbung von Klassenmerkmalen und Klassenhierarchien
Planetenbewegungen und das n-Körper-Problem
Im Projekt Planetenbewegungen und das n-Körper-Problem werden wir uns mit dem Themenbereich des deterministischen chaotischen Verhaltens befassen. Bei hochgradig nicht-linearen Bewegungsgleichungen sind chaotische Bewegungen möglich und das theoretische Verständnis eines solchen deterministischen Chaos ist meist nur mittels aufwendiger Computersimulationen möglich. Betrachtet man drei Körper, die sich gegenseitig durch ihre Schwerkraft beeinflussen, so ist das entstehende System von Bewegungsgleichungen im Allgemeinen nicht mehr analytisch lösbar. Wir werden im Laufe dieses Unterkapitels auch Bewegungen mit mehr als drei Körpern simulieren und stellen deshalb die zugrundeliegende Bewegungsgleichung schon allgemein für n Körper dar. Die zugrundeliegende Bewegungsgleichung wird durch das folgende System von gekoppelten Differenzialgleichungen zweiter Ordnung beschrieben: \[ \begin{equation} \frac{d^2 \vec{r}_i}{dt^2} = \sum_{j=1\\i \neq j}^n G \cdot m_j \cdot \frac{\vec{r}_j-\vec{r}_i}{\left| \, \vec{r}_j-\vec{r}_i \right|^3} \nonumber \end{equation} \] wobei $\vec{r}_i$ und $m_i (i \in {1,2,...,n}$) der Ortsvektor und die Masse des Körpers $i$ und $G$ die Gravitationskonstante ist. In dem Jupyter Notebook 3-Body-Problem.ipynb betrachten wir zunächst die numerische Lösung des Dreikörperproblems mittels Python und simulieren einige bekannte reguläre Bewegungen. Wir werden dabei z.B. sehen, dass die erst im Jahre 2000 gefundene Lösung der Achterschleife auch für lange Zeiten stabil ist, wohingegen die elliptischen Lagrangeschen Lösungen, bei gleichen Massenwerten, instabil sind und nach einiger Zeit chaotisches Verhalten zeigen. Gerade in den letzten Jahren wurden viele neue reguläre Bewegungen im Dreikörperproblem gefunden. Die untere Animation zeigt z.B. ein System mit den Massenwerten $m_1 = 2$, $m_2 = 0.9$ und $m_3 = 1$, welches im Jahre 2022 von den Wissenschaftlern Xiaoming Li und Shijun Liao von der Shanghai Jiao Tong University in China mittels Methoden der künstlichen Intelligenz (maschinellem Lernen) gefunden wurde.
In der oberen Abbildung ist sowohl die Bewegung der drei Körper im Konfigurationsraum $(x,y)$ (große Animation oben links) als auch deren zeitliche Entwicklung im Phasenraum ihrer radialen Zentrumskoordinaten dargestellt (kleine Animationen $v_{r_i}$ vs. $r_i$). Der gemeinsame Schwerpunkt der Körper ist dabei stets im Ursprung (siehe kleines Diagramm rechts unten, beachte x-y-Skala).
In diesem Unterpunkt werden wir, unter Verwendung der im Unterpunkt Abgeleitete Klassen, Vererbung von Klassenmerkmalen und Klassenhierarchien erlernten Konzepte ein C++-Programm erstellen, welches das n-Körper Problem numerisch löst. Am Ende betrachten wir als Beispiel die Planetenbewegungen unseres Sonnensystems und simulieren die Sonnenfinsternise 2026/27 (näheres siehe Planetenbewegungen und das n-Körper-Problem).
Vorlesungsaufzeichnung (16.06.2026)
Vorlesungsaufzeichnung (18.06.2026)
Vorlesungsaufzeichnung (23.06.2026)
Vorlesungsaufzeichnung (24.06.2025)
Vorlesungsaufzeichnung (26.06.2025)
Übungsblatt Nr. 11
Vorlesung 10
Die schwingende Kette ist ein interessantes Problem aus der klassischen Mechanik. Jede der Massenpunkte (bzw. Perlen) der Kette bewegt sich nach seiner bestimmten Bewegungsgleichung und bei einer Kette von $N$-Perlen muss man somit $N$ gekoppelte Differentialgleichungen zweiter Ordnung lösen. Mittels eines Jupyter Notebooks, unter Verwendung der SymPy Bibliothek, werden die Spezialfälle für $N=3$ und $N=5$ analytisch behandelt und die Eigenfrequenzen und Eigenschwingungen des Systems analysiert. In der vorigen Vorlesung, im Unterpunkt Systeme von gekoppelten Differentialgleichungen und Differentialgleichungen zweiter Ordnung hatten wir besprochen, wie man Systeme von gekoppelten Differentialgleichungen erster Ordnung und Differentialgleichungen zweiter Ordnung numerisch lösen kann. Im Hinblick, auch auf die noch folgenden Projekte, wurde der Kern-Algorithmus der numerischen Lösung (Runge-Kutta-Verfahren, Ordnung 4) in einer C++ Klasse auslagert. Da wir bei der schwingenden Kette ein System von $2 N$ Differentialgleichungen erster Ordnung lösen wollen, musste die Klasse allgemeinen gestaltet werden und die Anzahl der zu lösenden Differentialgleichungen wurde im Programm allgemein gehalten (näheres siehe Projekt: Die schwingende Kette).
Im zweiten Teil dieser Vorlesung betrachten wir weitere wichtige Sprachkonstrukte der Programmiersprache C++. C++ Klassen stehen häufig in Beziehung zueinander und die hierarchische Einteilung in Basisklasse (auch Oberklasse oder Superklasse) und abgeleitete Klasse (auch Subklasse) und das Konzept der Vererbung von Merkmalen der Basisklasse an die Subklasse, ist ein oft verwendetes und nützliches Konstrukt bei der Erstellung von umfangreichen C++ Programmen. Die Vererbung von Klassenmerkmalen kann in Form einer Schnittstellenvererbung oder/und Implementierungsvererbung geschehen. Die Konzepte der Vererbung werden zunächst an einfachen Beispielen erläutert und danach wird der Vererbungsmechanismus am Beispiel des Pendels erläutert.
Im dritten Teil dieser Vorlesung (Unterpunkt: Planetenbewegungen und das n-Körper-Problem) wenden wir das bisher erlernte an und betrachten die numerische Lösung des n-Körper-Problems (n Körper, die sich gegenseitig durch ihre Schwerkraft beeinflussen).
Vorlesung 11
Der erste Teil dieser Vorlesung befasst sich mit den prüfungsrelevanten Inhalten der anstehenden Klausur und es werden Beispielaufgaben und deren Musterlösungen vorgestellt. Danach werden wir das Programmierprojekt Das periodisch angetriebene Pendel besprechen und den Themenbereich der nichtlinearen Dynamik und des deterministischen Chaos näher kennenlernen. Im dritten Punkt dieser Vorlesung wird dann auf das Paradigma der parallelen Programmierung und das Rechnen auf Supercomputern eingegangen. Bei aufwendigen und rechenintensiven großen Programmen ist es oft nötig, die Programme zu parallelisieren; d.h. den Quelltext des Programms so umzuschreiben, dass einzelne, voneinander unabhängige Teil-Tasks gleichzeitig nebeneinander ausgeführt werden können.
Klausurvorbereitung und prüfungsrelevante Themen
Im Hinblick auf die anstehende Klausur werden in diesem Unterpunkt die prüfungsrelevanten Inhalte der einzelnen Vorlesungen aufgelistet und Beispielaufgaben und deren Musterlösungen besprochen. Näheres siehe Klausurvorbereitung und prüfungsrelevante Themen.
Das periodisch angetriebene Pendel mit Reibung
Das Projekt periodisch angetriebenes Pendel mit Reibung ist ein Anwendungsfall aus der klassischen Mechanik (siehe z.B. Walter Greiner, 'Klassische Mechanik II' [8. Auflage, 2008, Kapitel VII27. Seite 496]). Das System besteht aus einem Pendel, auf welches zusätzlich eine äußere Kraft mit periodischer Zeitabhängigkeit wirkt. Außerdem soll das Pendel durch eine geschwindigkeitsabhängige Luftreibung gedämpft sein. Die zugrundeliegende Bewegungsgleichung des periodisch angetriebenen Pendels ist stark nichtlinear und die, nur auf numerischem Weg berechenbaren Lösungen, zeigen bei gewissen Parameterkonstellationen deterministisch chaotische Bewegungen. Die nebenstehende Animation zeigt hingegen eine reguläre (nicht-chaotische) Bewegung des periodisch angetriebenen gedämpften Pendels zusammen mit der entstehenden zugehörigen Phasenraumtrajektorie. Man erkennt, dass die Pendelbewegung, nach einer gewissen Einschwingphase, einem Attraktor-Grenzzyklus zuläuft und die Phasenraumtrajektorie dann stabil auf einer periodischen regulären Bewegung bleibt. In dem Projekt werden die numerischen Berechnungen sowohl in Python (siehe Jupyter Notebook Das periodisch angetriebene Pendel (AngetriebenesPendel.ipynb)), als auch in C++ (siehe GetriebenesPendel.cpp) simuliert (näheres siehe Das periodisch angetriebene Pendel mit Reibung).
Das Paradigma der parallelen Programmierung und das Rechnen auf Supercomputern
Computersimulationen von realistischen, komplizierten Problemen erfordern sogar auf Supercomputern (Hochleistungs-Großrechenanlagen, bei denen eine große Anzahl von Mehrprozessor-Computern zu einem Computer-Cluster System verbunden sind) oft eine enorme Rechenzeit. Bei der Konzeption der Simulationsprogramme ist es deshalb erforderlich, dass die Rechenleistung des Computers stets voll ausgelastet ist und separate, voneinander unabhängige Teilaufgaben innerhalb der Programme gleichzeitig (parallel) berechnet werden. Das Paradigma der parallelen Programmierung ist die Art und Weise, wie man ein Programm gestaltet, damit die in dem Programm enthaltenen Teilberechnungen (Tasks) möglichst gleichzeitig, nebeneinander berechnet werden können. Diese Nebenläufigkeit der Programmstränge, die gleichzeitige Ausführung mehrerer Tasks, lässt sich in C++ relativ einfach mittels OpenMP (Open Multi-Processing) realisieren. Die nebenstehende Animation zeigt die Ergebnisse von 25 unterschiedlichen Pendelsimulationen, wobei die Anfangsgeschwindigkeiten und Reibungskoeffizienten der Pendel variiert wurden. Da es sich hierbei um 25 unabhängige Teilaufgaben handelt, ist eine Parallelisierung einfach im Programm zu implementieren (näheres siehe Das Paradigma der parallelen Programmierung und das Rechnen auf Supercomputern). Ein weiteres Beispiel der Anwendung einer Parallelisierung eines rechenintensiven Programms stellt die Berechnung des Attraktordiagramms des periodisch angetriebenen Pendels dar (siehe voriger Unterpunkt Das periodisch angetriebene Pendel mit Reibung und Abbildung auf der rechten Seite). In dem Diagramm wird eine Großzahl von unterschiedlichen Pendelsimulationen dargestellt, wobei sich jeweils der Wert der Amplitude der äußeren periodischen Kraft unterscheidet (siehe GetriebenesPendel_attr_dia_omp.cpp für eine Version mit OpenMP-Parallelisierung).
Vorlesungsaufzeichnung (25.06.2026)
Vorlesungsaufzeichnung (01.07.2025)
Vorlesungsaufzeichnung (03.07.2025)
Vorlesungsaufzeichnung (08.07.2025)
Übungsblatt Nr. 12
Vorlesung 11
In dieser und der nächsten Vorlesung werden wir uns weiter mit dem Themenbereich des deterministischen chaotischen Verhaltens befassen. Im Projekt Das periodisch angetriebene Pendel mit Reibung werden wir sehen, dass chaotische Pendelbewegungen in Abhängigkeit eines Systemparameters (bei uns die Amplitude der äußeren periodischen Kraft $A$) möglich sind und mittels Computersimulationen analysiert werden können. Computersimulationen von realistischen, komplizierten Problemen erfordern sogar auf Supercomputern (Hochleistungs-Großrechenanlagen, bei denen eine große Anzahl von Mehrprozessor-Computern zu einem Computer-Cluster System verbunden sind) oft eine enorme Rechenzeit. Bei der Konzeption der Simulationsprogramme ist es deshalb erforderlich, dass die Rechenleistung des Computers stets voll ausgelastet ist und separate, voneinander unabhängige Teilaufgaben innerhalb der Programme gleichzeitig (parallel) berechnet werden. Das Paradigma der parallelen Programmierung ist die Art und Weise, wie man ein Programm gestaltet, damit die in dem Programm enthaltenen Teilberechnungen (Tasks) möglichst gleichzeitig, nebeneinander berechnet werden können. Diese Nebenläufigkeit der Programmstränge, die gleichzeitige Ausführung mehrerer Tasks, lässt sich in C++ relativ einfach mittels OpenMP (Open Multi-Processing) realisieren (näheres siehe Das Paradigma der parallelen Programmierung und das Rechnen auf Supercomputern). Die folgende Abbildung stellt das Attraktordiagramms des periodisch angetriebenen Pendels dar und die Berechnungen der dafür notwendigen 2000 Pendelsimulationen wurden mit einem parallelen OpenMP-Programm durchgeführt (näheres siehe Das periodisch angetriebene Pendel mit Reibung).

Vorlesung 12
In dieser Vorlesung werden wir zwei weitere Projekte betrachten (Das Doppelpendel und Die Achterbahn). In beiden Projekten werden zunächst die Bewegungsgleichungen des betrachteten Systems unter Verwendung der Euler-Lagrange Gleichungen mittels eines Jupyter Notebooks generiert. Das Umschreiben der DGL zweiter Ordnung in ein System von DGLs erster Ordnung und die Implementierung und Lösung der Gleichungen mittels eines C++ Programms wird ebenfalls vorgeführt. Im dritten Punkt werden zwei aktuelle, komplexe Anwendungsbeispiele vorgestellt, bei denen die theoretisch, physikalische Forschung auf Computersimulationen angewiesen ist.
Das Doppelpendel
Das Projekt Doppelpendel ist ein Anwendungsfall aus der klassischen Mechanik. Das System besteht aus zwei miteinander verbundenen Pendeln, wobei wir die Luftreibung zunächst vernachlässigen. Die Herleitung der Bewegungsgleichungen des Doppelpendels erfolgt am elegantesten mittels der Euler-Lagrange Gleichungen, bzw. mittels der Hamilton Theorie. Mittels der Lagrange-Gleichungen gelangt man zu zwei gekoppelten Differentialgleichungen zweiter Ordnung, die man dann in ein System von vier gekoppelten DGLs erster Ordnung umschreiben muss um es numerisch lösen zu können. Die zugrundeliegende Bewegungsgleichung des Doppelpendels ist stark nichtlinear, sodass kleine Abänderungen in den Anfangswerten, nach einiger Zeit qualitativ unterschiedliche Bewegungen zur Folge haben (deterministisches Chaos). Die nebenstehende Animation verdeutlicht eine solche chaotische Bewegung des Doppelpendels und zeigt zusätzlich die entstehende Phasenraumtrajektorie des zweiten, unteren Pendels. In dem Projekt werden die numerischen Berechnungen sowohl in Python (siehe Jupyter Notebook Das Doppelpendel (Doppelpendel.ipynb)), als auch in C++ (siehe Doppelpendel.cpp) simuliert (näheres siehe Das Doppelpendel).
Die Achterbahn
Das Projekt Achterbahn ist ein Anwendungsfall aus der klassischen Mechanik. Das Problem ist eine Verallgemeinerung des Problems "Bewegung eines Massenpunktes auf einer Zykloidenbahn" (siehe Aufgabe 15.7: Walter Greiner, 'Klassische Mechanik II' [8. Auflage, 2008, Kapitel V15. Seite 271]). Das System besteht aus einem Achterbahn-Wagen der reibungsfrei auf einer Metallschiene gleiten soll. Die Achterbahn hat eine Länge von $l$ und besitzt keine Kurven, sodass man den Verlauf der Metallschiene der Achterbahn als eine eindimensionale Funktion $h(x) \, , \,\, x \in [-l/2, l/2]$ beschreiben kann, wobei $h(x)$ die Höhe der Metallschiene der Achterbahn an der Position $x$ in der Einheit Metern beschreibt. Die Koordinaten des Wagens seien $\vec{r} = \left( x(t), \, y(t) \right) = \left( x(t), \, h(x(t)) \right)$ und seine Masse sei durch den Parameter $m$ gekennzeichnet. Die Herleitung der Bewegungsgleichungen erfolgt am elegantesten mittels der Euler-Lagrange Gleichungen, bzw. mittels der Hamilton Theorie. Die Bewegung eines Wagens wird durch eine Differentialgleichung zweiter Ordnung bestimmt und diese hängt nicht von dem Wert der Masse des Wagens ab. Um diese DGL zweiter Ordnung numerisch lösen zu können, schreibt man sie in ein System von zwei DGLs erster Ordnung um. Die obere Animation visualisiert die C++ Simulation zweier Wagen, wobei der Verlauf der Metallschiene der Achterbahn durch die Funktion $h(x) = e^{\frac{\sqrt{x^2}}{10}} \cdot \left( \hbox{sin}\left( \frac{x^2}{10} \right) \right)^2$ gegeben ist (näheres siehe Projekt: Die Achterbahn).
Anwendungsbeispiele und weiterführende Vorlesungen
Die Anwendungsmöglichkeiten der Programmierung sind vielschichtig und speziell im Bereich der theoretischen Physik, sind viele der aktuellen Forschungsfragen nur mittels aufwendiger Computersimulationen lösbar.
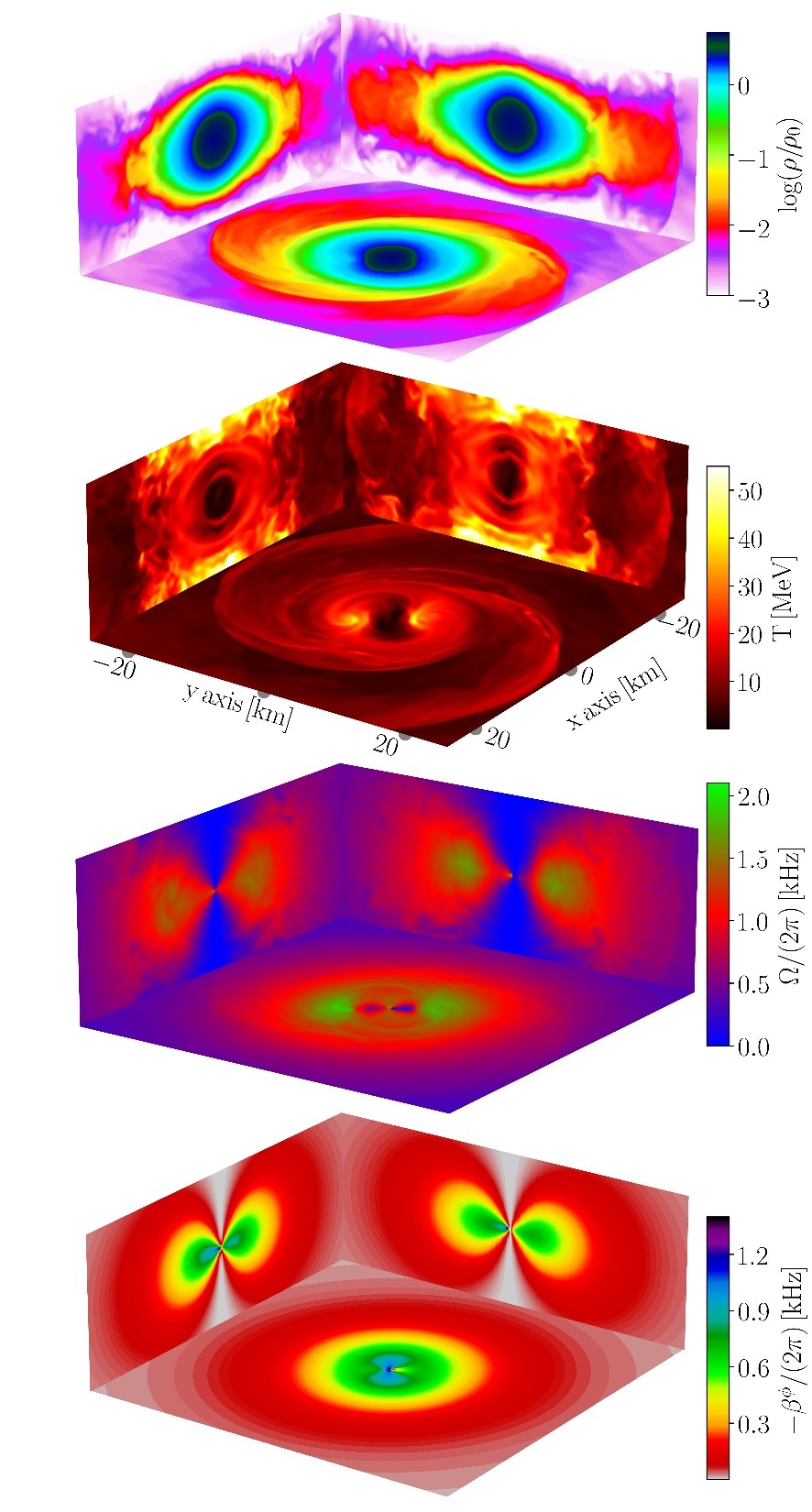
Eines dieser aktuellen Anwendungsfelder ist die numerische relativistische Astrophysik und die numerische allgemeine Relativitätstheorie. Das Einstein Toolkit (ET) ist eine Softwareplattform, mit der man Probleme aus dem Bereich der relativistischen Astrophysik und Gravitationsphysik numerisch am Computer simulieren kann. Das ET entwickelte sich im Jahre 1998 aus dem Cactus Code und im Laufe der letzten 20 Jahre wurde seine Performance (hocheffiziente OpenMP/MPI Parallelisierung) und Anwendungsbreite ständig verbessert. Mittlerweile kann man mit dem frei zugänglichen ET-Code Kollisionen von schwarzen Löchern und Neutronensternen simulieren. Die nebenstehende Abbildung zeigt einige Eigenschaften (Dichte, Temperatur, Rotationsprofil und Frame-Dragging) des in einer Neutronenstern-Kollision produzierten hypermassiven Neutronensterns und wurde mit dem ET simuliert und mittels Python visualisiert. Näheres siehe Vorlesung 'Allgemeine Relativitätstheorie mit dem Computer'.
Der wissenschaftliche Untersuchungsgegenstand des zweiten aktuellen Anwendungsfeldes der Programmierung ist, im Gegensatz zum ersten, ein der menschlichen Wahrnehmung näheres. Die Spieltheorie ist ein bedeutendes Mittel zum modellhaften Verständnis komplexer sozioökonomischer Entscheidungs-Prozesse. In ihrer herkömmlichen Form werden die handelnden Akteure als rein rational und egoistisch handelnde Individuen aufgefasst (homo oeconomicus) und eine Population bestehend aus einer großen Anzahl von solchen interdependenten Entscheidern kann sich zu einem Dilemma-artigen Zustand entwickeln. Im Gegensatz zur Physik, die die Gesetzmäßigkeiten der leblosen Materie/Energie und deren Wechselwirkungen in Raum und Zeit betrachtet, ist in der evolutionären Spieltheorie das zu erforschende Ding, der Mensch, und wir sind daran interessiert, wie dieser sich bei ökonomischen oder sozial relevanten strategischen Entscheidungen verhält. Viele Wirtschafts- und Sozialwissenschaftler betrachten die Spieltheorie als die formale Sprache der ökonomischen Theorie. Agentenbasierte Computersimulationen von spieltheoretischen Problemen auf komplexen sozio-ökonomischen Netzwerken sind ein interdisziplinäres aktuelles Forschungsfeld; näheres siehe Vorlesung Physik der sozio-ökonomischen Systeme mit dem Computer.
Vorlesungsaufzeichnung (10.07.2025)
Vorlesungsaufzeichnung (15.07.2025)
Vorlesungsaufzeichnung (17.07.2025)
Vorlesungsaufzeichnung (22.07.2025)
Vorlesungsaufzeichnung (24.07.2025)
Vorlesung 12
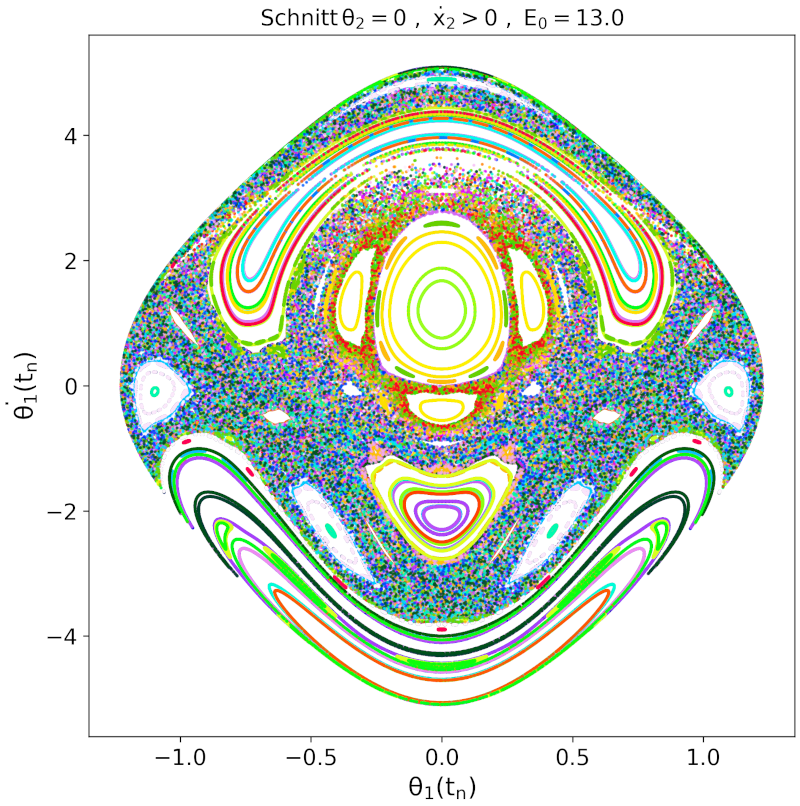
Die zwei in dieser Vorlesung behandelten Projekte benutzen die Programmiersprache Python zunächst zum Aufstellen der zugrundeliegenden Bewegungsgleichungen des betrachteten Systems. Die Herleitung der Bewegungsgleichungen eines physikalischen Systems mittels der Euler-Lagrange Gleichungen, ist ein eleganter mathematischer Trick, um auch komplizierte Systeme analytisch beschreiben zu können. Mittels eines Jupyter Notebooks unter Verwendung der SymPy Bibliothek ist eine solche Herleitung auch auf dem Computer gut zu implementieren. Im Projekt Das Doppelpendel wird dann das entstehende System von Bewegungsgleichung zweiter Ordnung in ein System von vier miteinander gekoppelten Differentialgleichungen erster Ordnung umgeschrieben und numerisch gelöst. Bei der Analyse der unterschiedlichen Bewegungen des Doppelpendels spielt die Gesamtenergie des Systems einen bedeutenden Stellenwert und bei geringer und ganz hoher Energie treten reguläre Bewegungen auf, wohingegen in einem mittleren Energiebereich chaotische Dynamiken vorherrschen. Mittels einer Poincaré-Abbildung bei fester Energie ist eine Analyse des chaotischen Verhaltens möglich (siehe untere Abbildung).
- Physik der sozio-ökonomischen Systeme mit dem Computer
- Allgemeine Relativitätstheorie mit dem Computer