|
|
|
Research interests |
|
| |
Prof. Claudius Gros |
| |
Self-Organized Robotics
Robots are normally hard controlled with the aim
to perform predefined movements. The same holds
for genetically encoded locomotion. Alternatively
one may consider motion to be generated by self-organizing
principles within the sensory-motor loop. In this case
the only sensory information available is the state of
the actuator, such as the angle of a limb or a wheel.
We use simulated and small real-world robots to study how locomotion
can be generated through the 'donkey-and-carrot' principle, which
state that the target state for the actuator is updated
as soon as the state of the actuator changes. One finds
that complex and reactive motion patterns may emerge,
with the actual motion pattern realized being dependent
on the initial conditions.
Click on images for movies
Computational Neurosciences, AI and Machine Learning
We develop theories and working principles for neural
models and synaptic learning. Our interests involve
both autonomous systems with self-sustained neural
activity, self-organized locomotion and the impact of
emotional control.
Cognitive systems theory is located at the crossroad between
computational neurosciences and machine learning, as it
regards both biological and artificial intelligences (AI).
One of the long-term goals is to formulate generating principles
allowing to construct modular information processing cognitive
systems which are, as far as possible, self-organizing.

- transient state dynamics
One of the aims of complex system theory is to generate
and examine the state of dynamical systems, which may
be chaotic, laminar or synchronized. We have studied
dynamical principles, such as attractor relict networks,
leading to transient state dynamics. Transient states of
activity correspond, as observed in the brain, to
semi-stable alternating attractors, which are thought to
be at the foundation of neural decision processes.
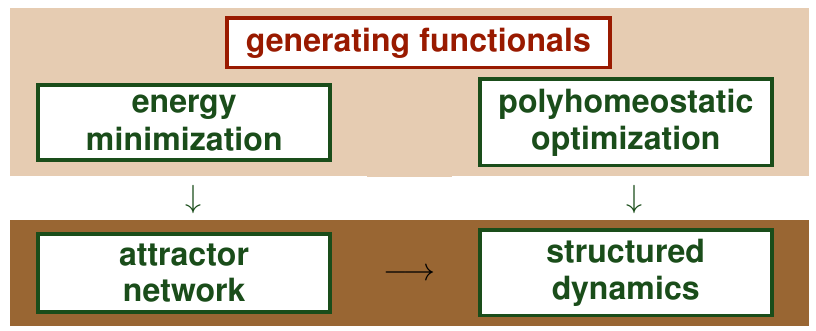
- guided self organization
It is mandatory, for the development of complex cognitive
systems, to develop principles on how to guide the
self-organization using overriding principles. For this
purpose we employ generating functionals for the derivation of
the evolution equations and examine the competition between
conflicting objective functions. In particular we investigate
generating functionals based on the principle of
homeostatic optimization; the system tries to achieve a
time-average distribution of local activities as close
as possible to a given target distribution determined
through information theoretical principles.
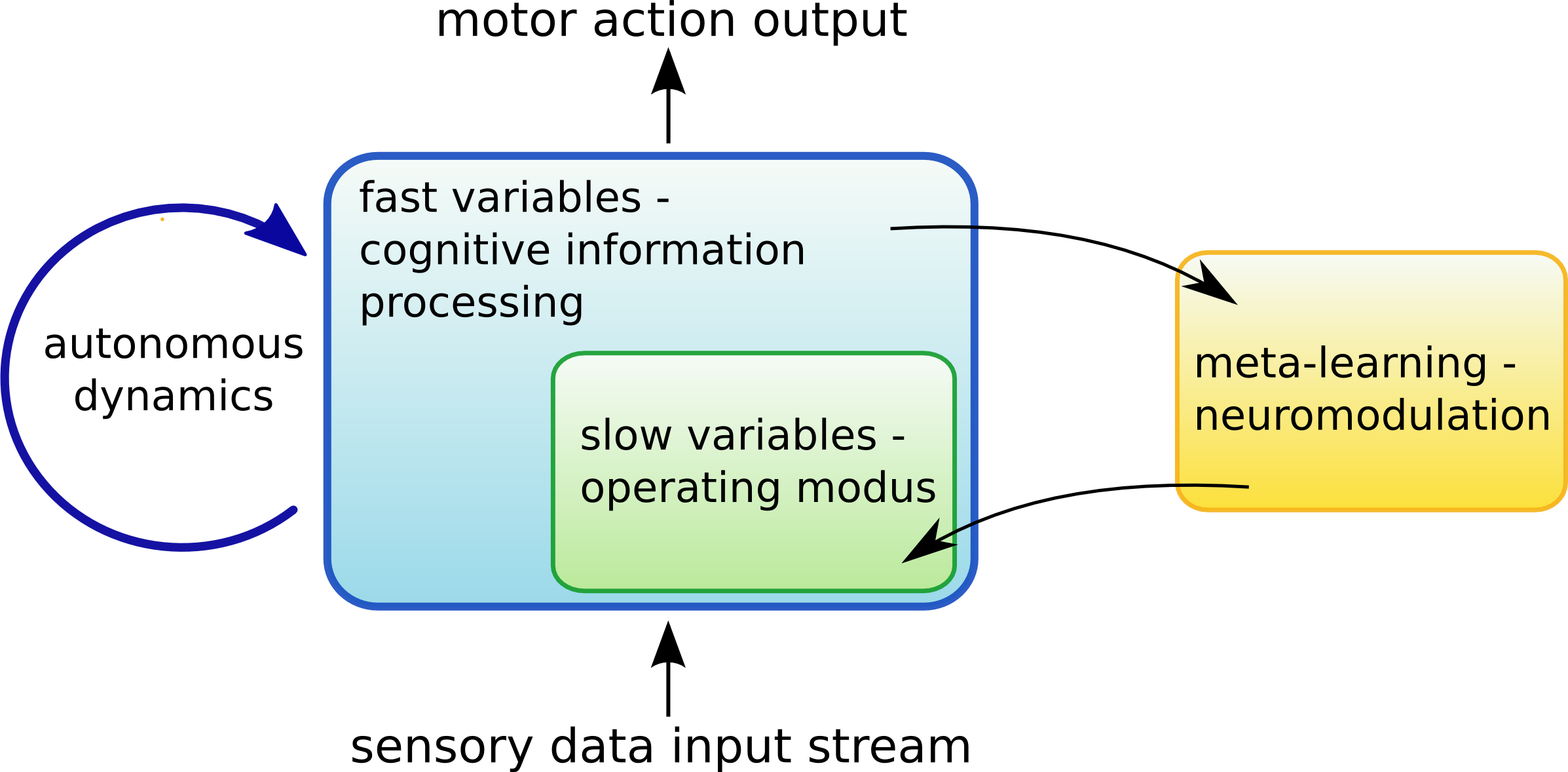
- emotional control & the time allocation problem
Our brain is a cognitive system, an adapting information
processing dynamical system having a task - to keep its
support unit, the body, alive. The brain has many different
working modi and these dynamical states are regulated
by an elaborated diffusive control mechanism, the emotional
control. It operates diffusively, influencing large areas
of downstream neurons. Emotional control does not influence
directly cognitive information processing, but regulates
the adaption of slow parameters, a mechanism denoted
meta-learning within dynamical systems theory. Of particular
interest is the role of emotional weighting for the time
allocation problem. In our studies we examine in particular
if advanced AIs will need a control system that is
functionally equivalent to emotions.
|
|





